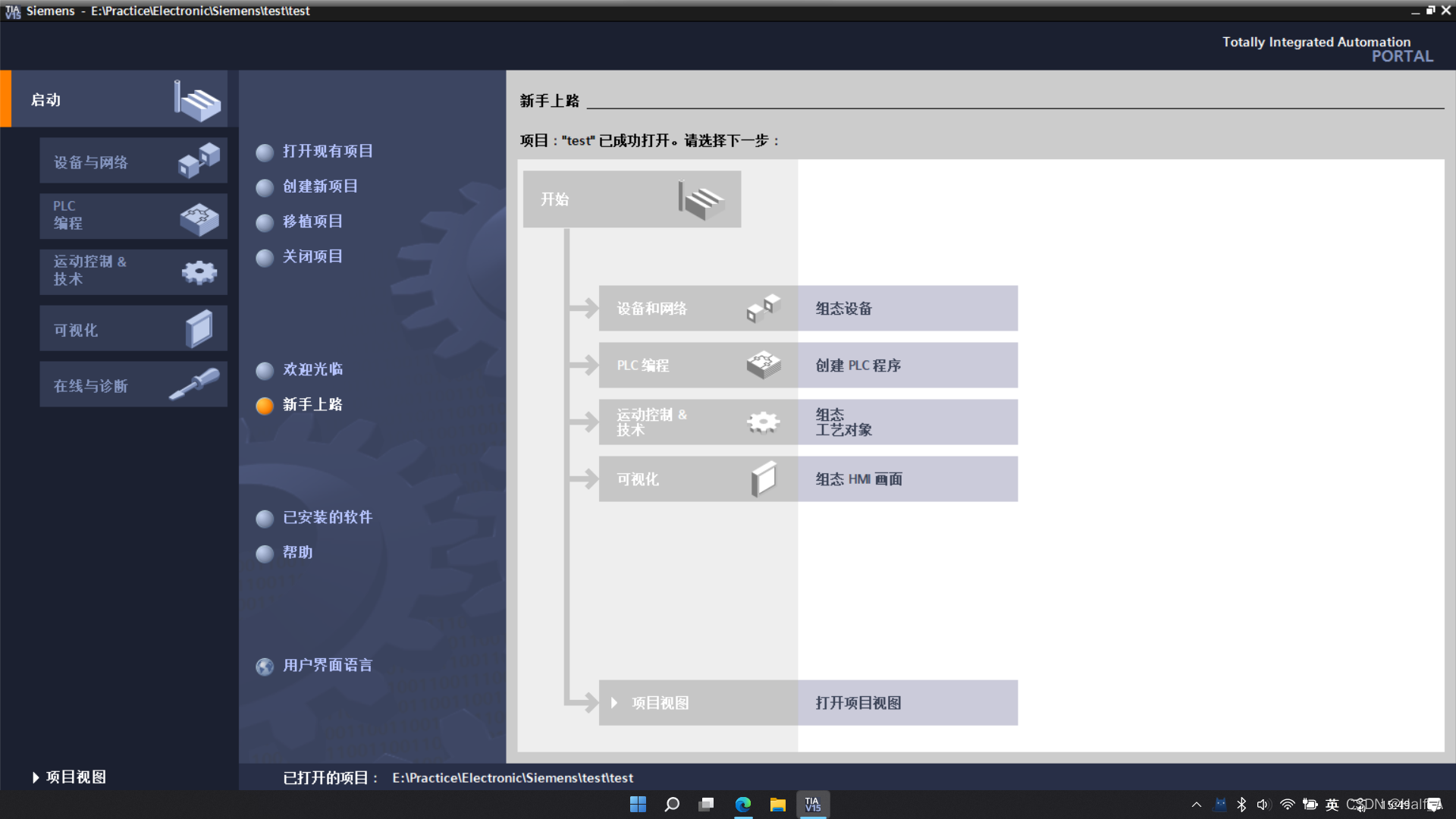
博途TIA Portal V15 下载与安装教程
西门子PLC自动化设计软件博途V15的安装教程。

河北工业大学机械电子工程专业课程资料(个人整理,请勿外传)
博主本科期间各课程所用到的资料汇总,包括公共课(如线代、大物),专业课等等。由于多数为本校老师个人制作使用的PPT、知识点资料,因此请仅用于个人学习使用,谢谢。
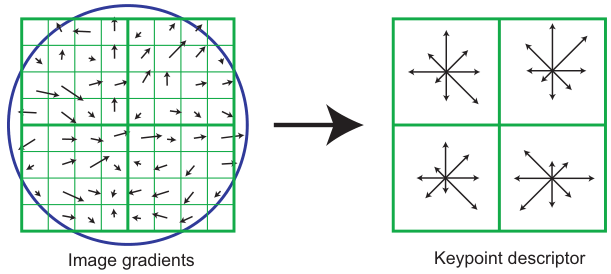
【目标识别】SIFT算法理论部分
SIFT是尺度不变特征转换,是一种用来检测和描述图像局部特征的算法。算法实际上是要在不同尺度空间中寻找极值点,并提取其位置、尺度和旋转不变量,这些关键点不会因光照、仿射变换和噪音而变化。主要实现步骤:(1)尺度空间极值检测;(2)关键点定位;(3)方向分配;(4)关键点描述和匹配。
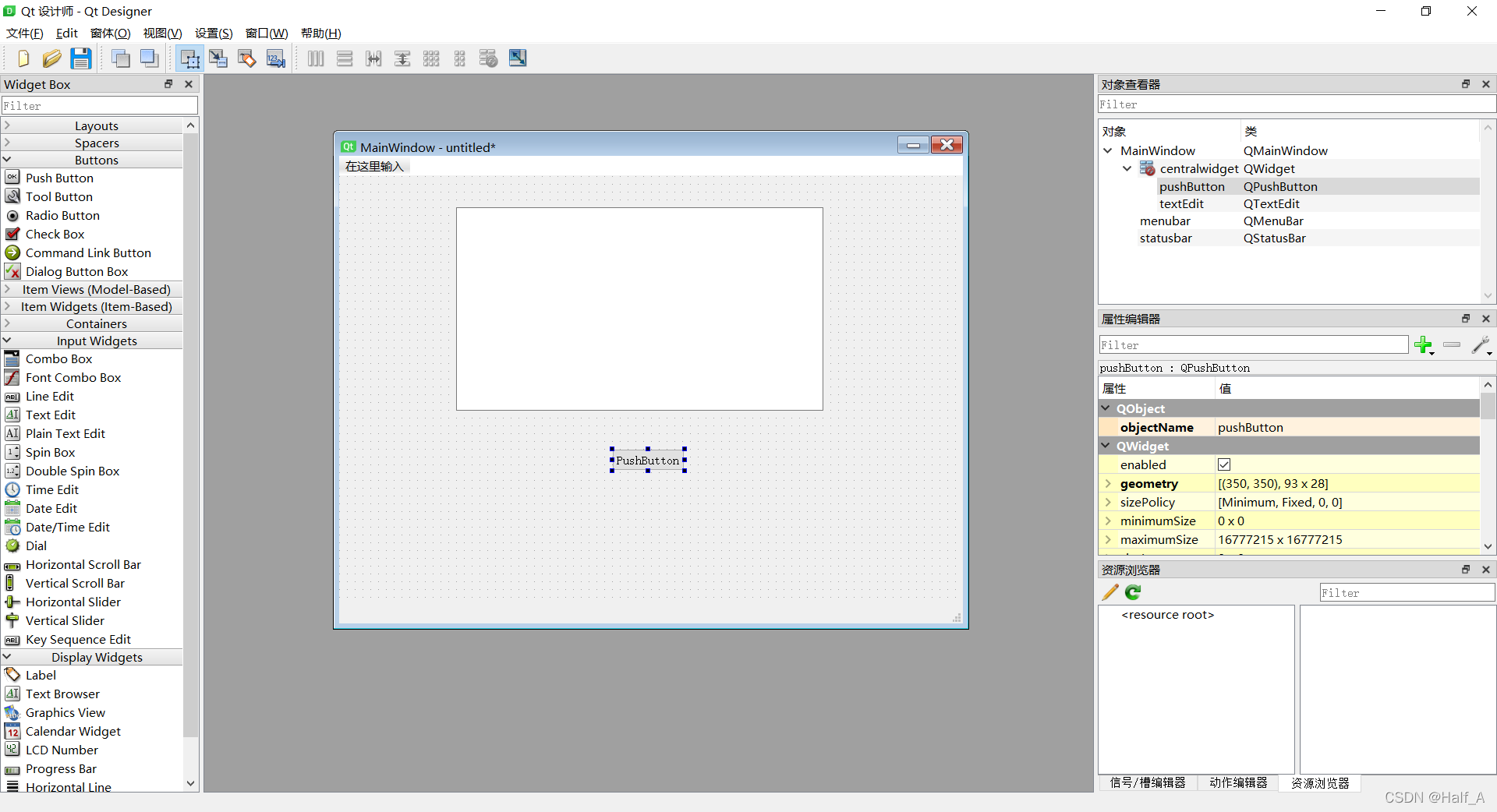
PyQt5图形界面GUI开发过程记录
由于最近实验室需要处理很多表格,因此使用python做了一个工具辅助处理。程序使用pyqt5作为图形界面,记录了从安装pyqt5,到设计界面,再到调用控件的代码,最后打包exe文件的全过程。
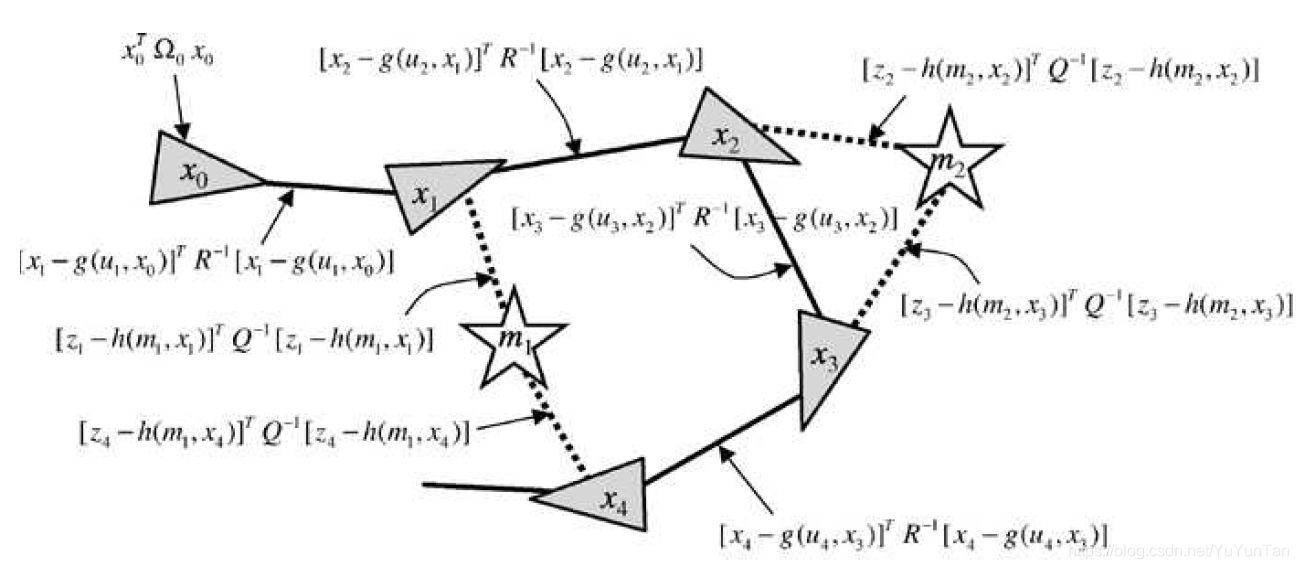
g2o图优化简介与基本使用方法
g2o(General Graphic Optimization)是一个基于图优化的库,将非线性优化与图论结合起来的理论,我们可以利用g2o求解任何可以表示为图优化的最小二乘问题。
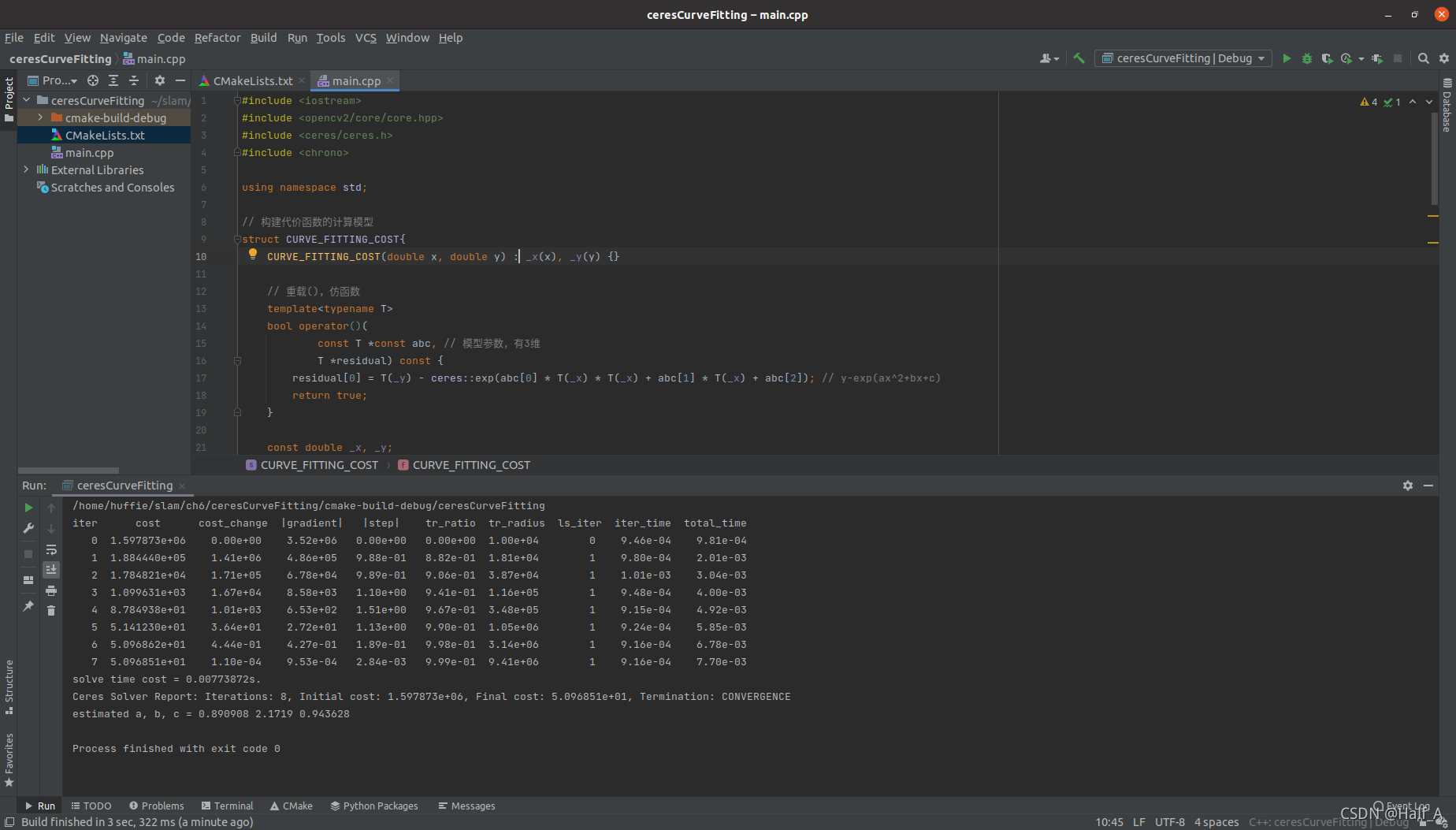
【Ceres基本使用方法】使用Ceres拟合曲线求解最小二乘问题
Ceres是一个最小二乘问题求解库,我们只需要定义待优化的问题,然后交给它计算即可。使用方法:1. 定义每个参数块。参数块就是简单的向量,也可以是四元数、李代数等特殊的结构……

STM32串口通信无反应
本人使用STM32F103C8T6最小系统板,当我在windows上调试好STM32程序并成功实现串口通信后。重启电脑后串口通信没有响应。
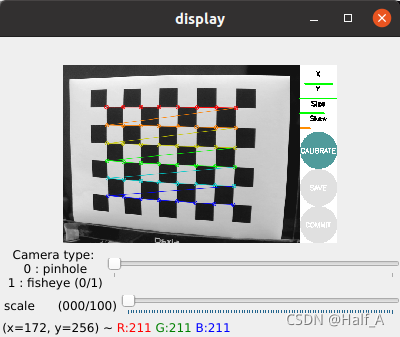
ROS外接usb摄像头标定方法
摄像头标定的目的是消除相机畸变,具体畸变原理可以参考之前的文章。usb摄像头在ros系统标定过程大致可以分成几个步骤。①安装usb_camera驱动包;②运行usb_cam读取usb摄像头图像;③下载打印棋盘格并进行摄像头标定。

Keil5 C51版 下载与安装教程(51单片机编程软件)
本教程介绍Keil5 51版的下载安装方法,Keil5是一款非常友好和强大的C语言软件开发系统。Keil5提供了清晰直观的操作界面,而且使用起来十分的轻松便捷,并具备编译器、编译器、安装包和调试跟踪功能。
Keil5 MDK版 下载与安装教程(STM32单片机编程软件)
本教程介绍Keil5 MDK版的下载安装方法,Keil5是一款非常友好和强大的C语言软件开发系统。Keil5提供了清晰直观的操作界面,而且使用起来十分的轻松便捷,并具备编译器、编译器、安装包和调试跟踪功能。