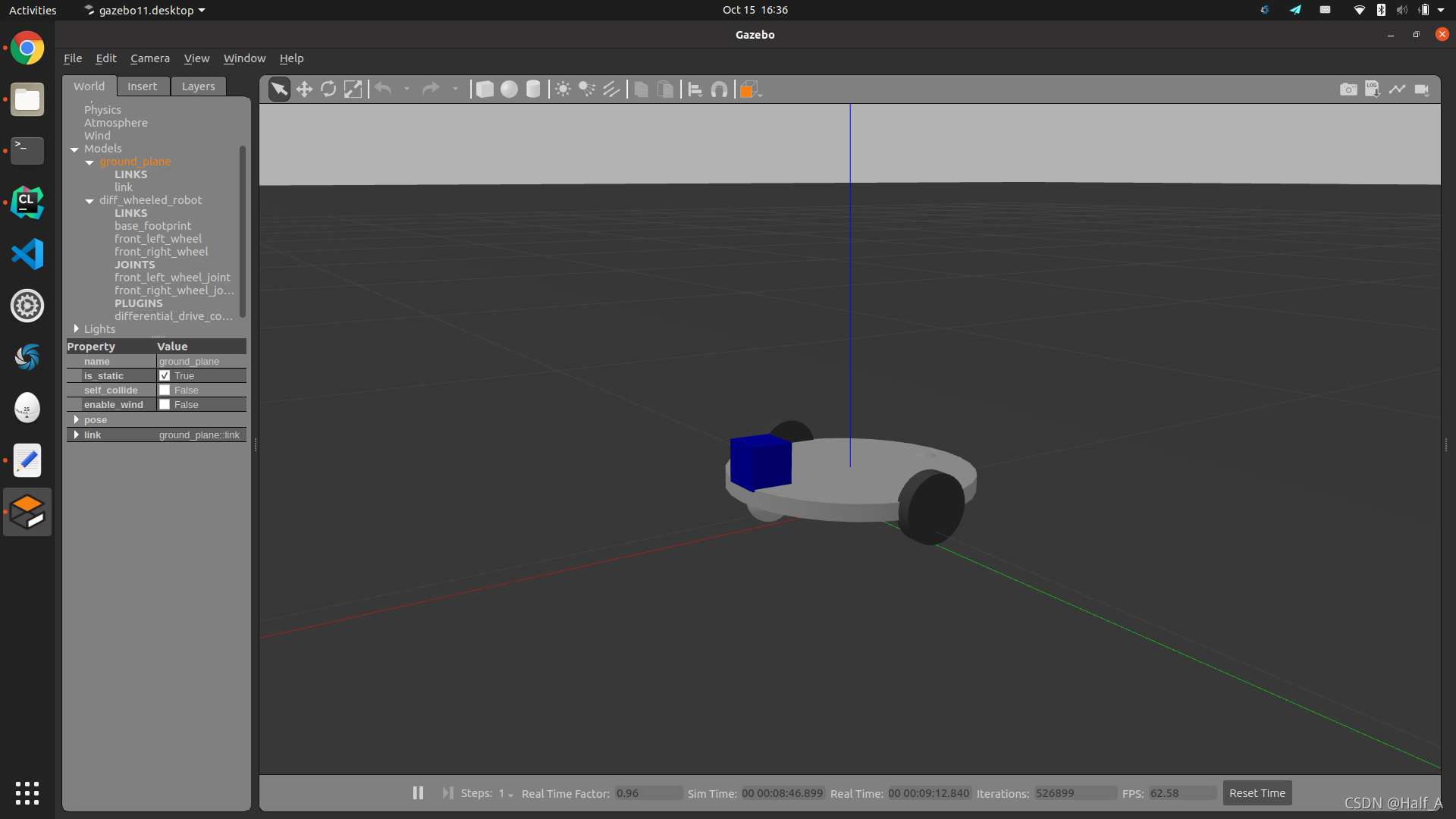
ROS+Gazebo仿真差速小车并实现控制
利用xacro描述文件创建差速小车模型,通过gazebo仿真此模型,然后利用libgazebo_ros_diff_drive.so插件控制小车的运动,最后实现了通过键盘按键,控制gazebo环境中的小车运动。
LabVIEW2020下载与安装教程
LabVIEW2020 中文版安装教程,提供阿里云盘链接与详细安装教程。资源仅供学习参考,请勿用于商业用途!

ImportError No module named cv2问题的解决方法(修改python默认版本)
在调用opencv安装包时,会出现ImportError No module named cv2的问题。我确定我已经安装了opencv,查阅资料后发现是因为安装opencv是会安装的python版本,与系统默认使用的版本不一致,才会导致找不到模块。
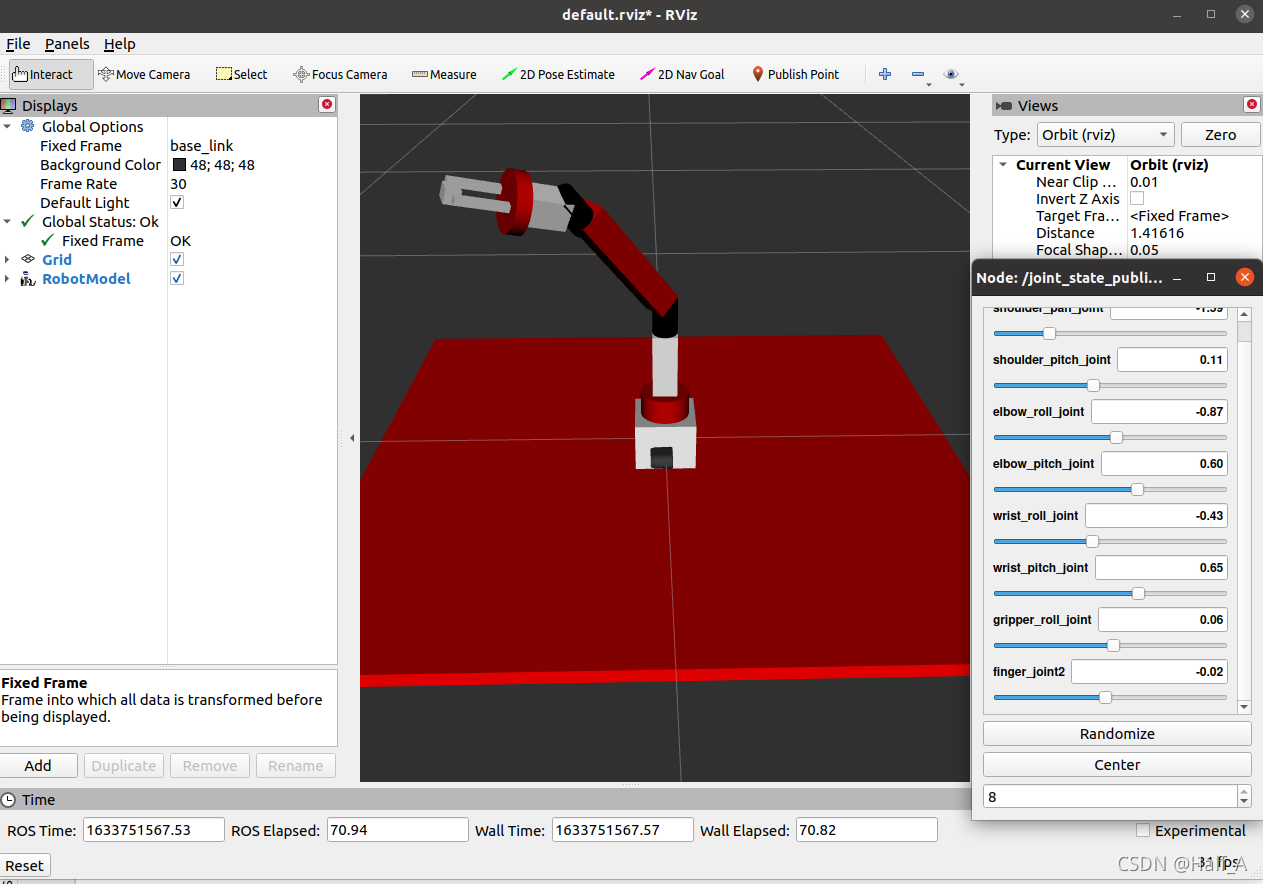
urdf与xacro的使用方法 & 机械臂模型仿真示例
为什么要创建机器人的三维模型,原因在于机器人机器人仿真工具可以帮助我们体现发现设计中的一些关键错误。而模型仿真的含义,在于我们创建的是机器人模型,因此不一定和实际机器人长得一模一样。但因为是仿真,所以模型必须具备所有的真实硬件特点。

相机模型与去畸变方法详解
首先介绍了针孔相机的成像原理以及实际坐标和像素坐标的转换方法。然后根据实际相机存在的一些问题,引入了畸变模型,并给出了去畸变的公式方法以及详细示例程序。

【PC端】各大网站VIP视频免费观看的一种方法
使用油猴插件+VIP破解脚本破解视频VIP限制。
保研问题汇总
能找到这篇文章说明你真的有认真在看,加油!相信你一定能收获最好的结果!
保研经验分享
保研结束了一段时间了,在这里做了一下总结,并给出了一些建议,希望看到此文章的学弟学妹们有所收获。
科学上网方法(如何访问Google,ChatGPT)
介绍如何查阅各种网站所收录的文献,及其下载方法。以及各大期刊的影响因子查询方法。
百度网盘不限速下载方法
使用油猴插件+IDM直链下载实现百度网盘不限速下载。