
【C++笔记】文件操作
程序运行时产生的数据都属于临时数据,程序一旦运行结束都会被释放。通过文件可以将数据持久化,C++中对文件操作需要包含头文件#include。
【C++笔记】继承
继承是面向对象的三大特性之一。定义类时,下级别的成员除了拥有上一级的共性,还有自己的特性。
【C++笔记】运算符重载
运算符重载的目的是对已有的运算符重新定义,赋予其另一种功能,以适应不同的数据类型。包括加号、左移、递增、赋值、关系、函数调用等运算符重载。
【C++笔记】友元
有些私有属性,可需要让类外特殊的一些函数或类进行访问,就需要利用友元。友元的关键字为fiend。友元的三种实现方法全局函数做友元、类做友元、成员函数做友元。
【C++笔记】对象模型和this指针
C++中,类内的成员变量和成员函数分开存储,只有非静态成员变量才属于类的对象。每一个非静态成员函数只会产生一份函数实例,也就是多个同类型的对象会共用一块代码,而代码如何区分哪个对象调用自己。这里就用到了this指针。
【C++笔记】构造函数与析构函数相关知识
每个对象需要有初始设置以及对象销毁前的清理数据的设置。对象的初始化和清理是两个非常重要的安全问题。一个对象或变量没有初始状态,对其使用后果未知;使用完一个对象或变量,没有及时清理,也会造成一定的安全问题。
【C++笔记】封装的意义,结构体和类的区别
封装的意义将属性和行为作为一个整体,表现生活中的事物;将属性和行为加以权限控制。设计类时,属性和行为写在一起,表现事物,语法规范如下
【C++笔记】函数的用法:函数的默认参数、占位参数、函数重载
在C++中,函数的形参列表中的形参是可以有默认值的。如果给形参传入了数据,就用自己的数据;如果没有,就用默认值,但需要注意如果某个位置已经有了默认参数,那么从这个位置往后,必须都有默认值。
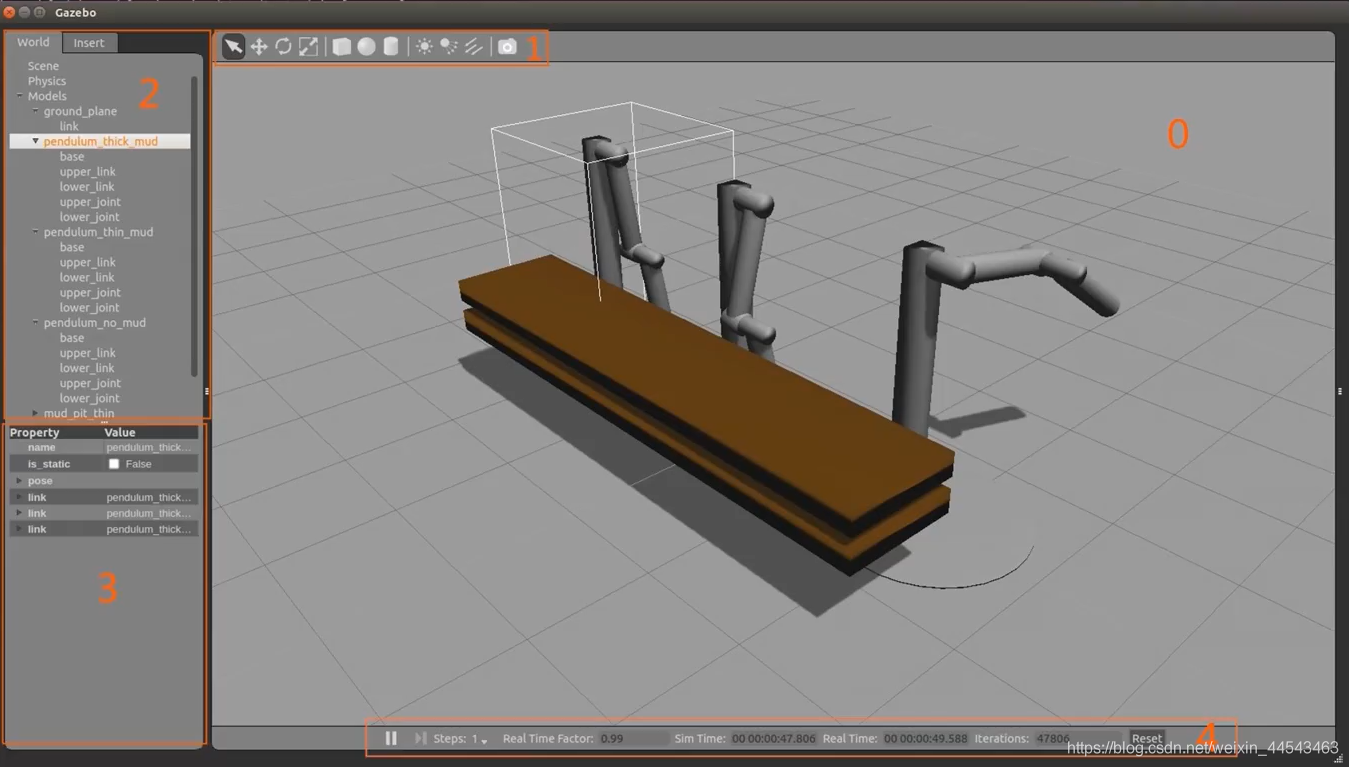
【ROS学习笔记】(十二)常用可视化工具
Rviz是一款三维可视化工具,可以很好的兼容基域ROS软件框架的机器人平台。Rviz可以通过图形化的方式显示机器人传感器信息、机器人运动状态、环境信息等。
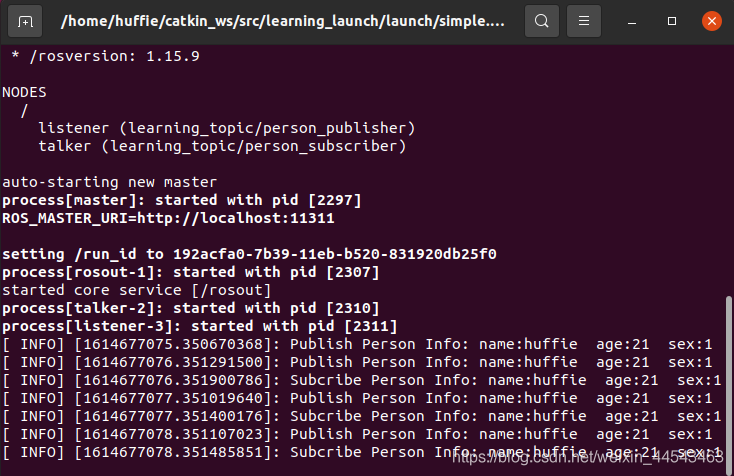
【ROS学习笔记】(十一)launch启动文件的使用方法
laubch文件的作用如下,通过XML文件实现多节点的配置和启动。同时可以自动启动ROS Master(不需要单独roscore)。