
【论文笔记】ACT 使用低成本硬件的双手操作模仿学习
斯坦福大学开发的双手模仿学习系统,包括一整套软硬件系统,实现低成本不精确硬件完成精细操作任务。
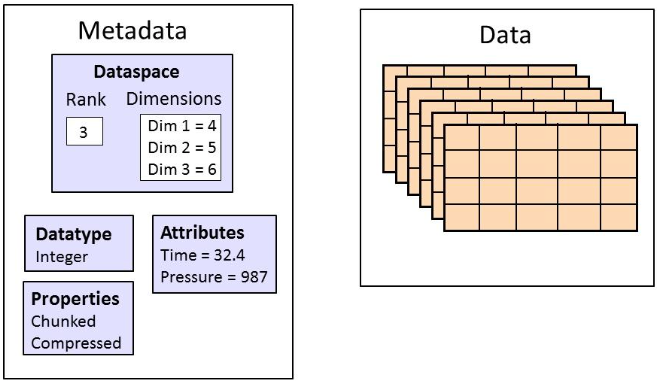
HDF5数据文件格式
HDF5数据文件格式的简单介绍与基本使用方法。
【仿真实验】robomimic项目复现
robomimic 是一个用于机器人从演示学习的框架,该项目提供了一系列机器人操作的演示数据和离线学习算法,可以让人们对任务和算法进行标准化测试。

【课程笔记】Stanford CS25 V2 - Robotics and Imitation Learning
Stanford CS25 V2中的一节课,由Google Brain工程师主讲的机器人学习主题课程。
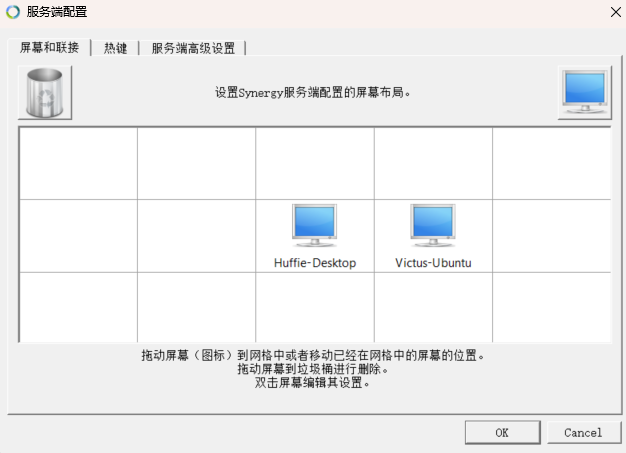
Ubuntu与Window双主机共用一套键鼠
Synergy是一款能够让使用者仅用一套键盘鼠标,就同时操控多部计算机的免费工具软件。
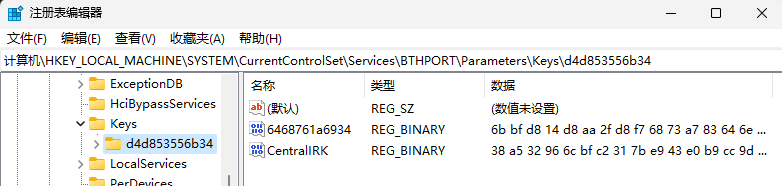
Windows与Ubuntu双系统绑定同一个蓝牙设备(无需重新配对)
本人安装了Ubuntu与Windows双系统,平时使用蓝牙鼠标与耳机,但是每次切换系统都需要重新配对设备,因此想要实现双系统配对。
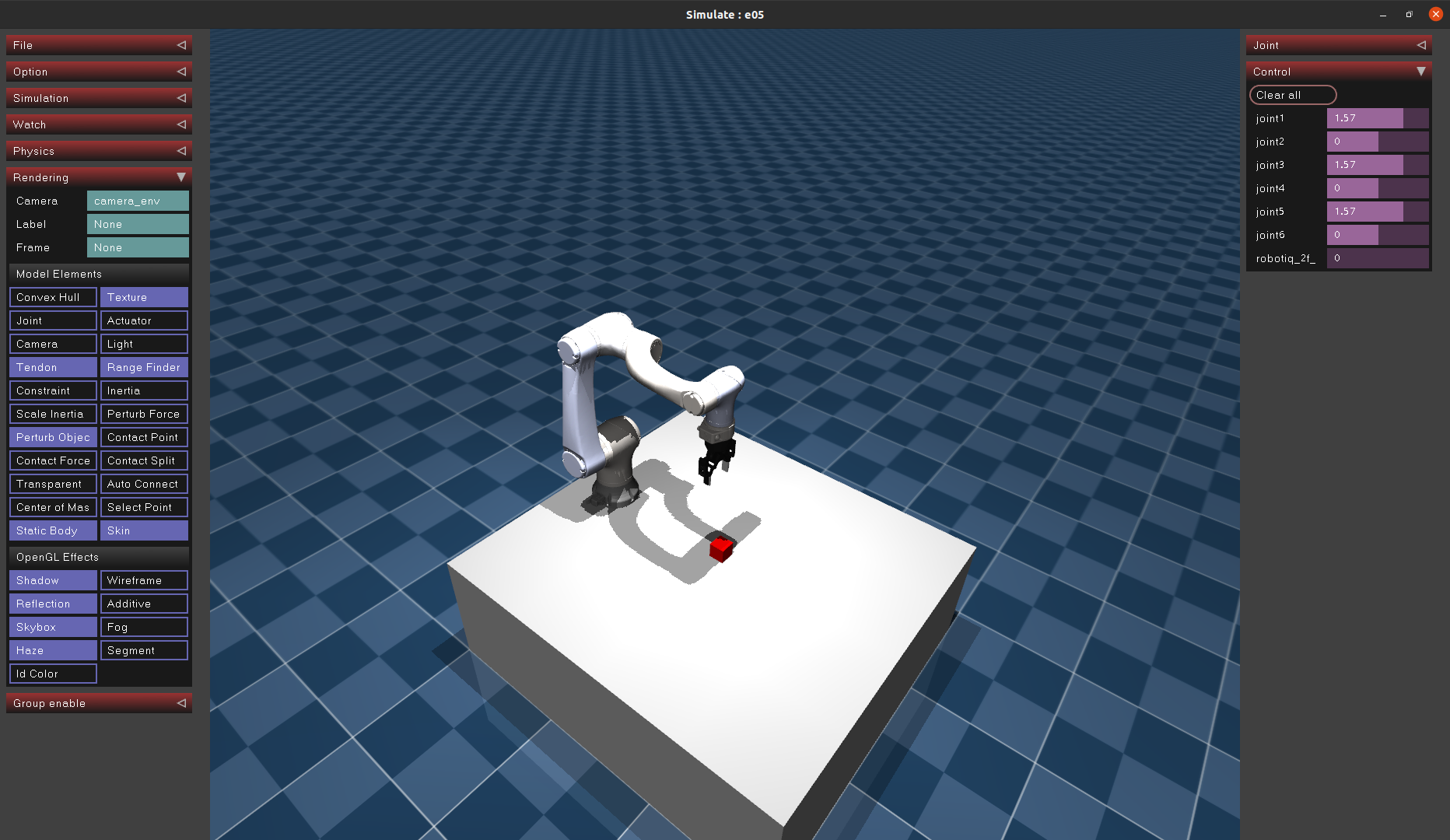
【实验准备】MuJoCo导入自定义机器人
将自定义机器人模型导入进Mujoco中,为后续强化学习搭建仿真环境基础。
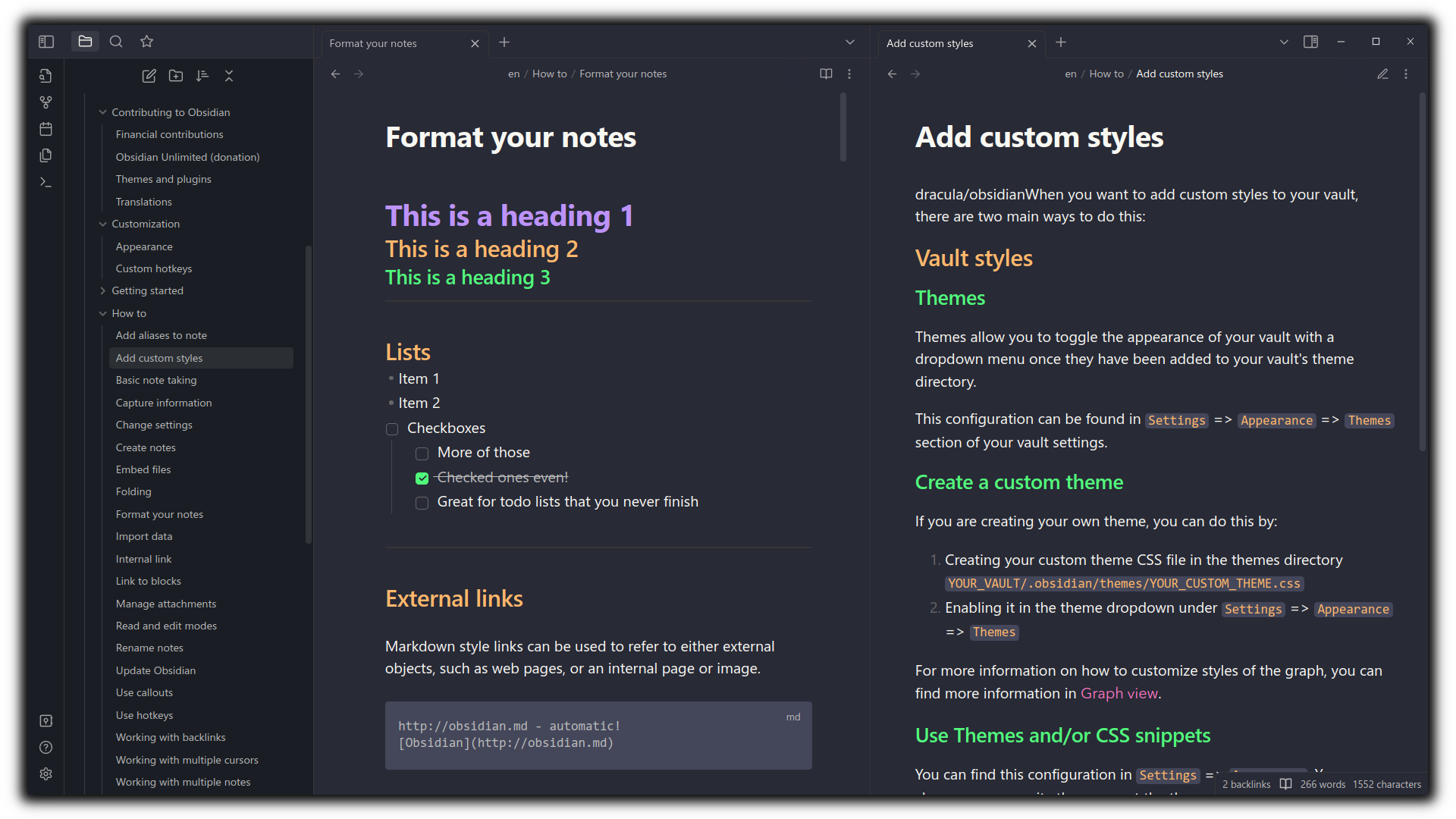
【笔记工具】Markdown语法与Obsidian编辑器
介绍一种我自己一直在用的非常强大的笔记语法Markdown,以及基于markdown语法的编辑器Obsidian.