【ROS学习笔记】(四)订阅者Subscriber的实现
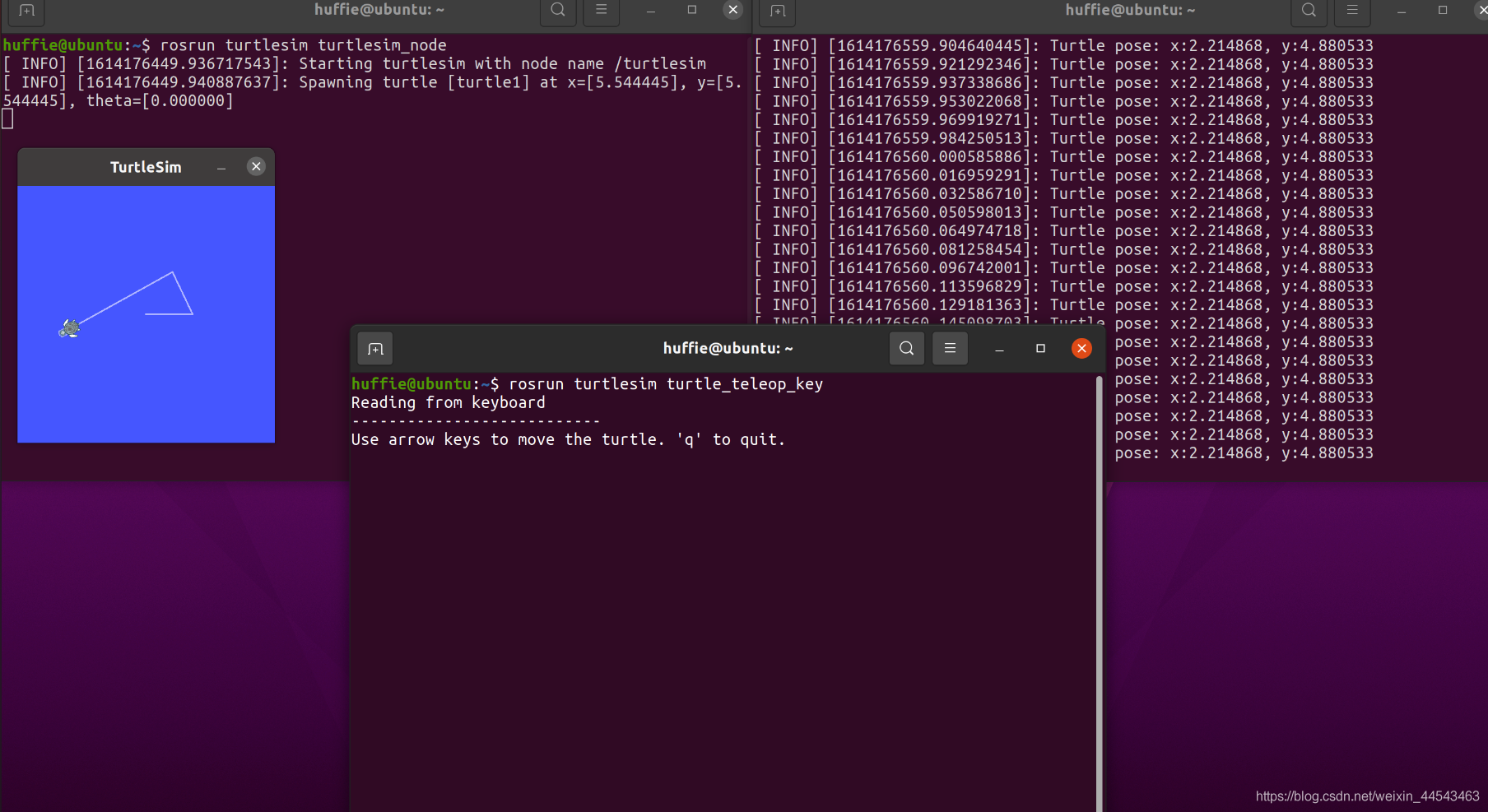
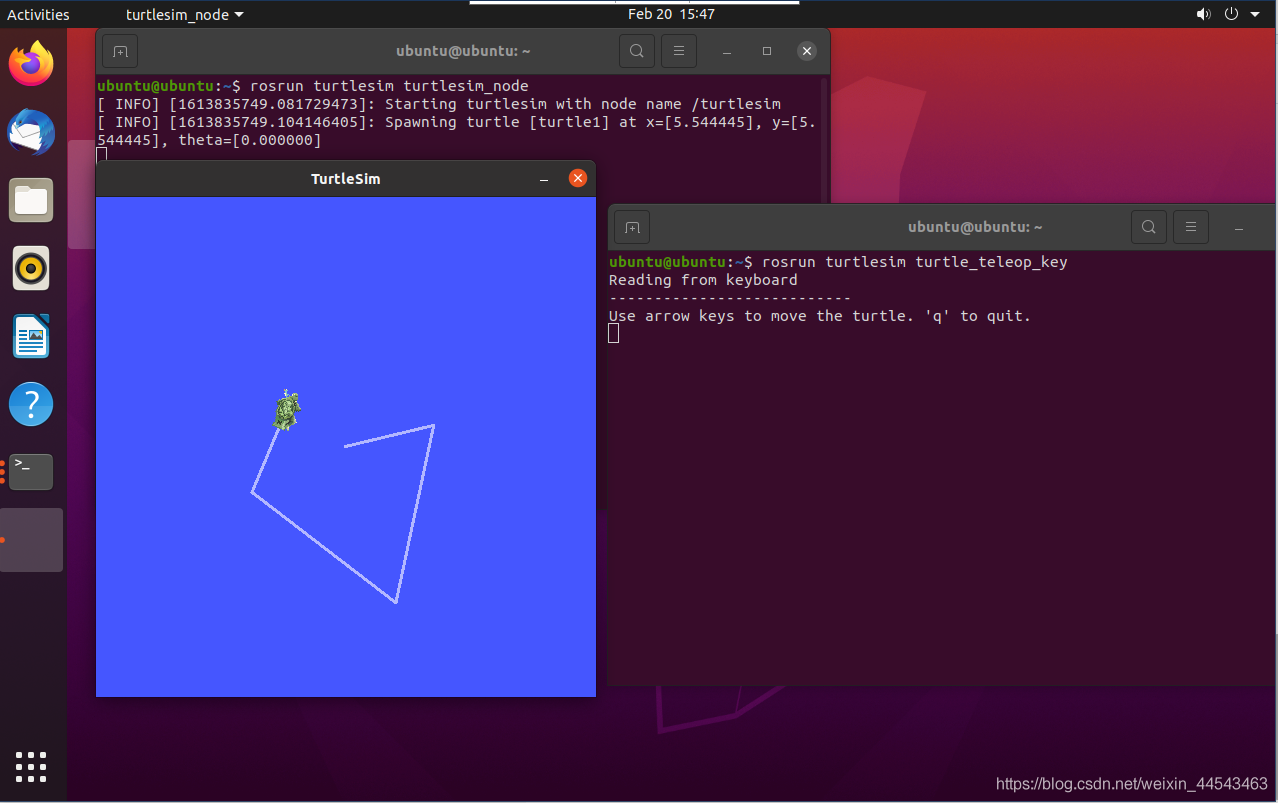
在ROS_Master中,可以发布与订阅消息,ROS_Master内有两个节点,一个是Subscriber(turtlesim),一个是Publisher,发布者通过程序实现发布Message,Message的内容包括线速度、角度,通过Topic管道,传递给Subscriber,从而控制小海龟的运动。
【ROS学习笔记】(三)发布者Publisher的实现
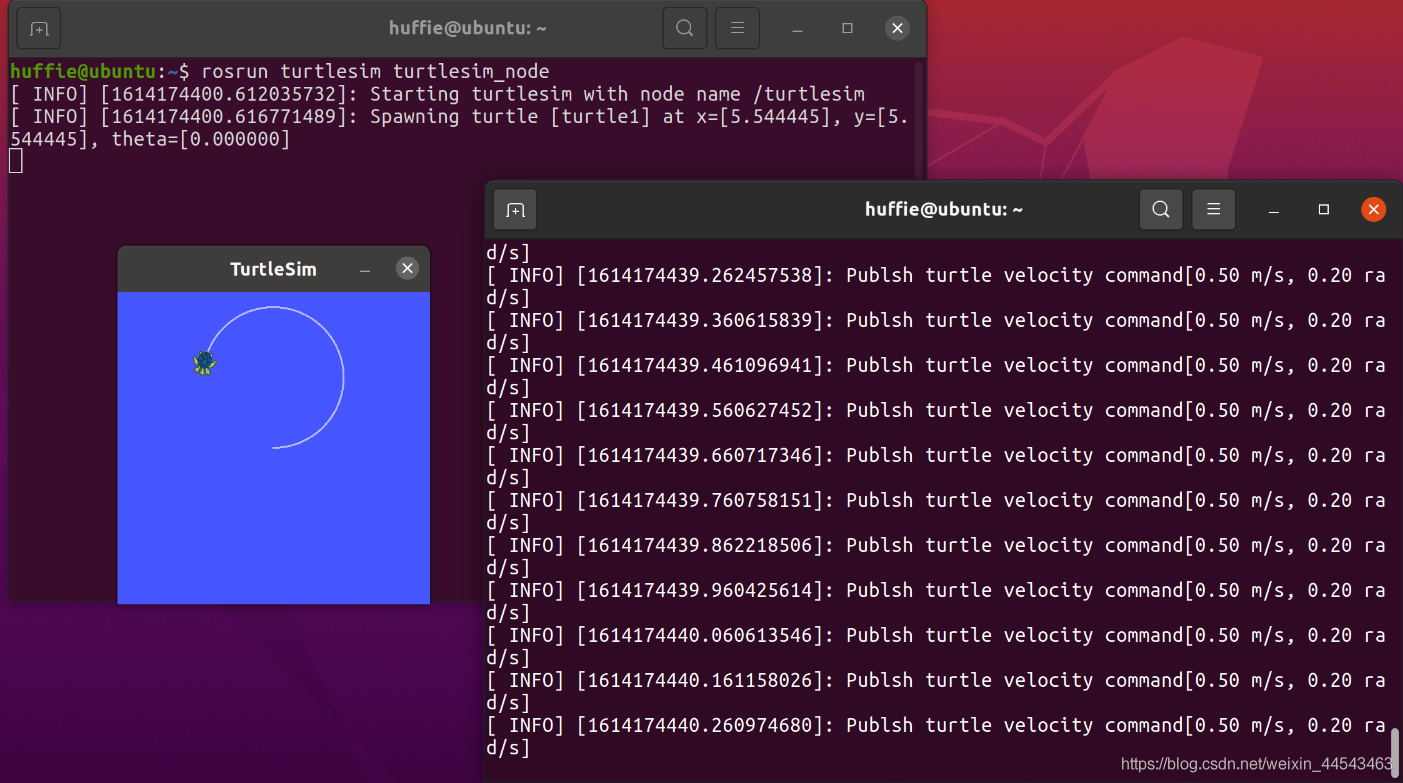
ROS Master内有两个节点,一个是Subscriber(turtlesim),一个是Publisher,发布者通过程序实现发布Message,Message的内容包括线速度、角度,通过Topic管道,传递给Subscriber,从而控制小海龟的运动。
【ROS学习笔记】(二)工作空间与功能包的创建
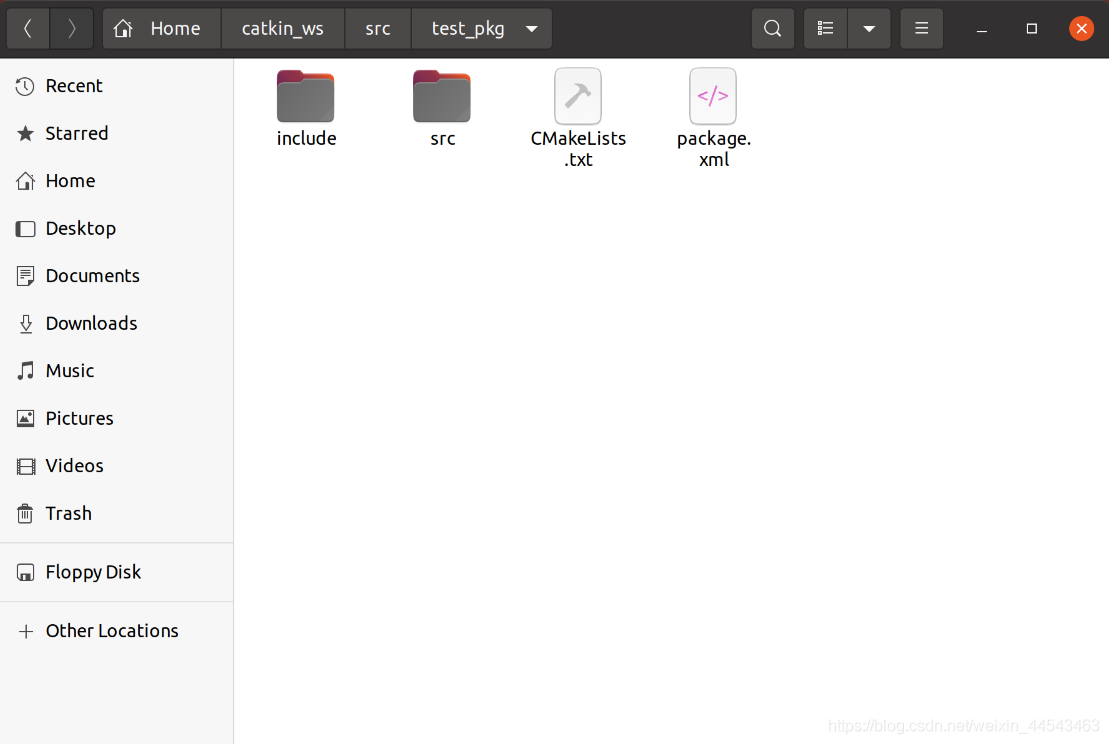
工作空间是存放工程开发相关文件的文件夹,类似windows中使用ide时创建的工程。工作空间包含的文件夹包括……
【ROS学习笔记】(一)常用命令的解释与举例
roscore是用来启动ros master,是运行ros系统前首先运行的命令;rosrun是用来运行某个功能包内的某个节点的指令,有两个参数,第一个参数是功能包名,第二个参数是节点名。
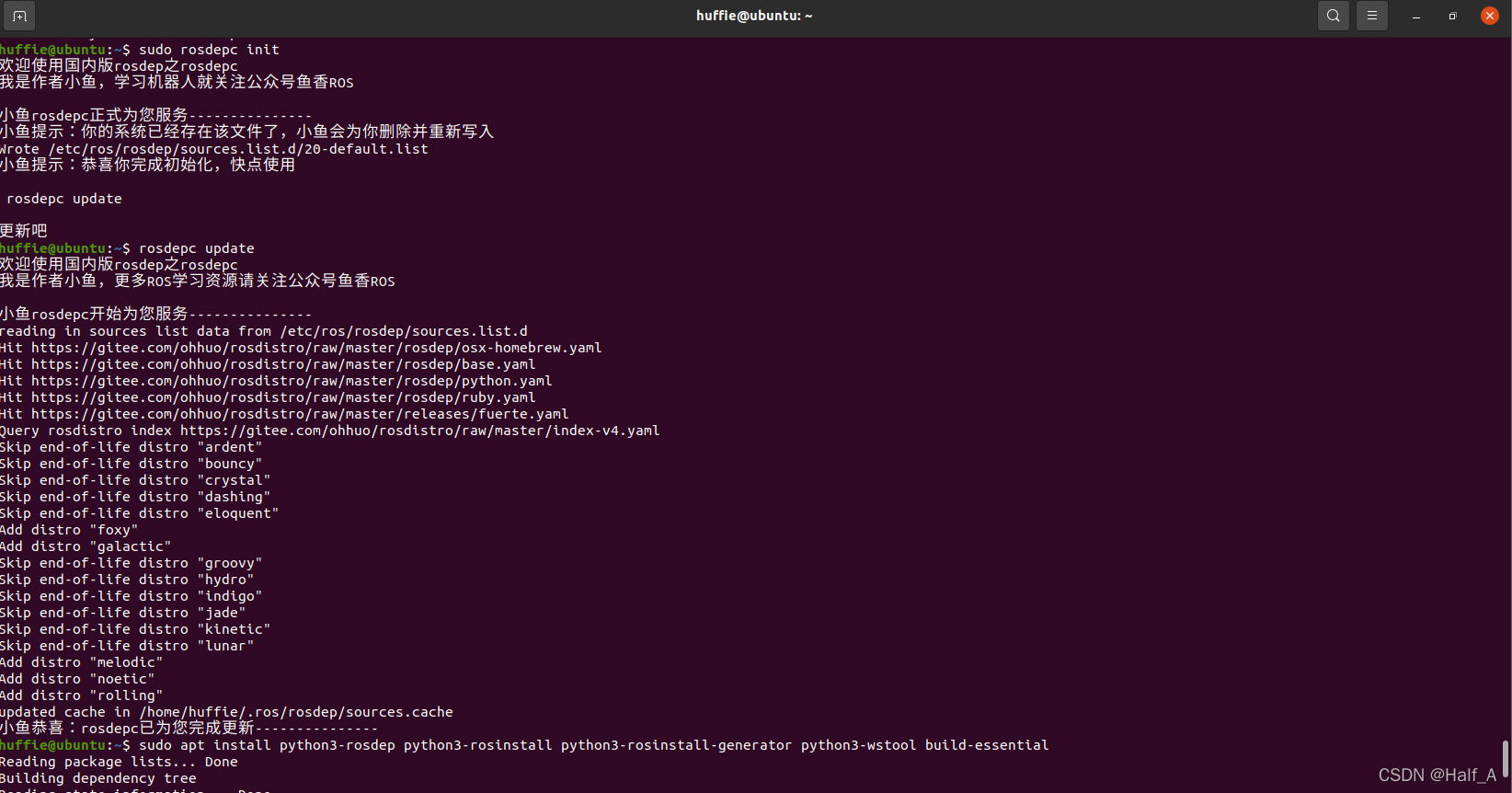
ROS安装时rosdep_init与rosdep_update问题解决方法(2022.04.08亲测)
ROS安装过程可见我的上一篇博客Ubuntu20.04安装ROS_Noetic。安装过程中rosdep_init出现【ERROR_cannot download_default_sources_list_from…Website_may_be down.】。rosdep_update,总是出现超时问题无法更新。最终找到了一种靠谱可用的方法。
Ubuntu20.04安装ROS Noetic
添加ROS软件源,打开软件与更新,将下载选项前四个都选上。一定要确保都勾选上,不然后续安装时会出现依赖关系问题。然后执行以下命令添加软件源,并添加公钥。
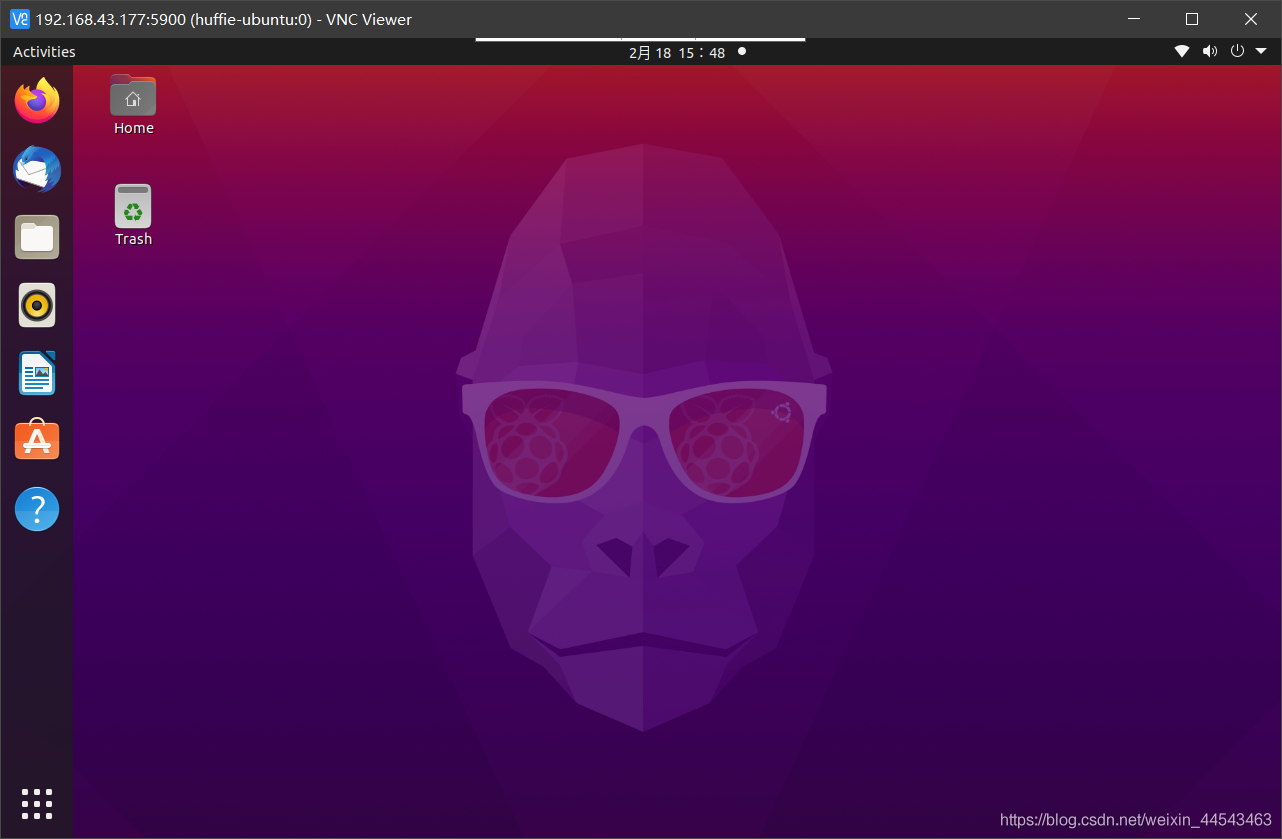
ubuntu使用VNC实现远程桌面
我想通过VNC实现远程桌面连接树莓派。但是在网上搜索了许多相关博客,尝试了各种方法,但总是出现各种问题,终于功夫不负有心人,我最终找到了一种实现的方法。

NodeJs安装方法
尝试在Ubuntu上使用Picgo,在安装插件时总出现提示需要安装nodejs,按流程安装后也无法解决,因此重新安装了一遍nodejs。

树莓派4B安装Ubuntu20.04
进入Ubuntu官网下载支持树莓派的Ubuntu版本安装包。使用DiskGenius格式化SD卡,将所有扇区删除,然后格式化。下载官方烧录工具,镜像选择刚才下载的.xz文件,SD卡选择自己的卡,写入即可。然后进行ubuntu环境配置……

Ubuntu系统Buglist(不定时更新)
Ubuntu系统使用过程中遇到的问题汇总。