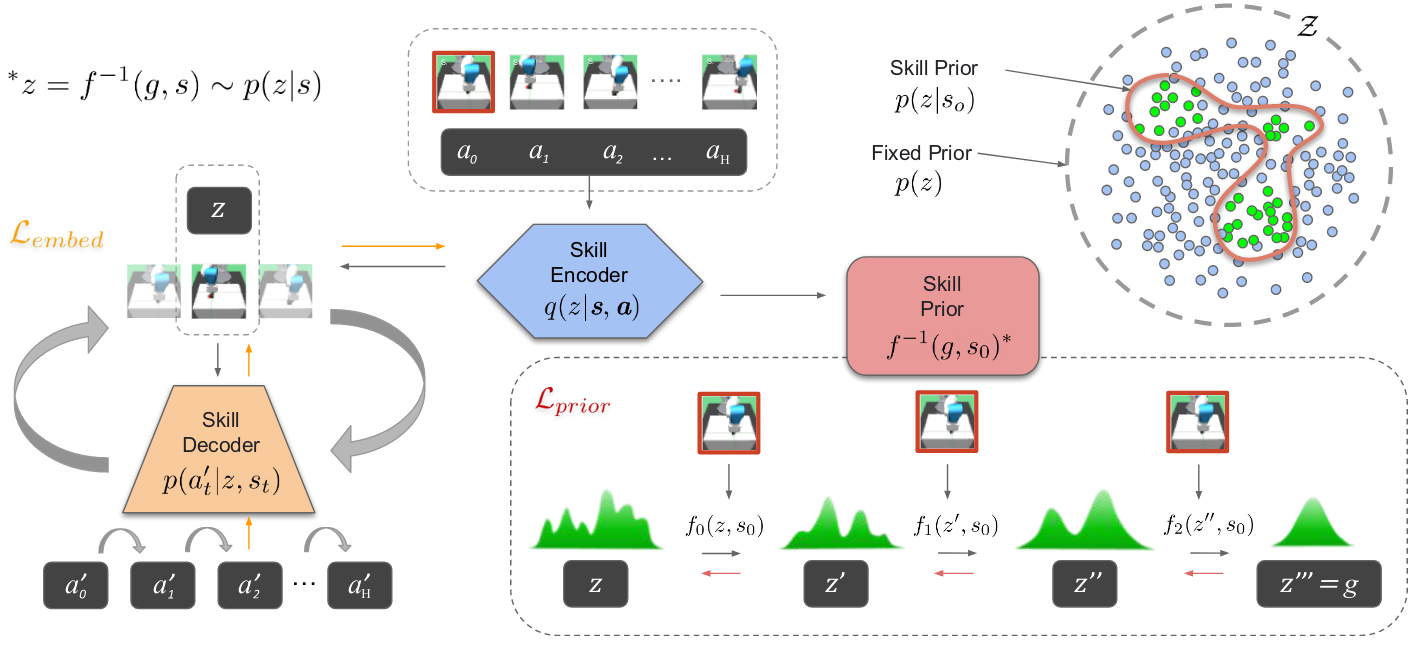
【论文笔记】Reskill基于技能的适应性动作空间学习
基于技能单元的强化学习方法,将任务分解为技能,建立技能与状态的映射关系,学习技能选择策略
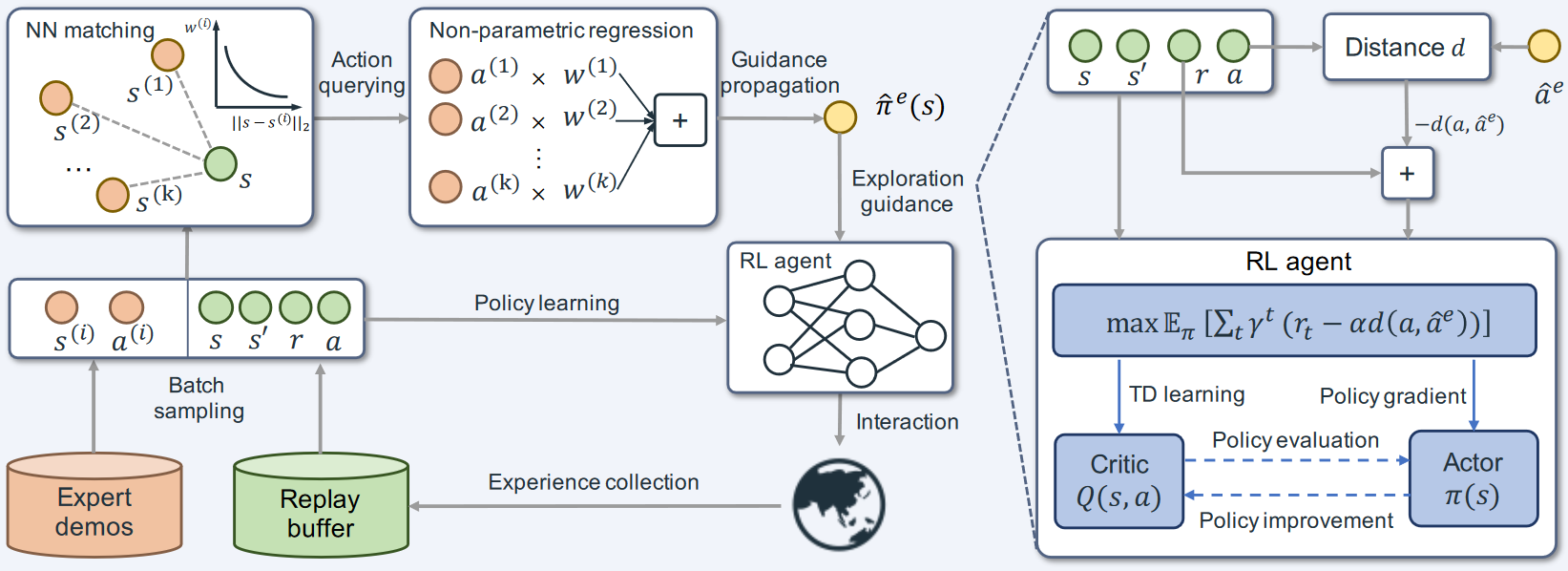
【论文笔记】Dex 演示引导强化学习与手术机器人任务自动化的高效探索
香港中文大学刘云辉团队基于DDPG+BC改进的手术机器人强化学习方法
强化学习与模仿学习Buglist(不定时更新)
强化学习环境搭建,项目运行过程中可能遇到的bug与解决方法记录
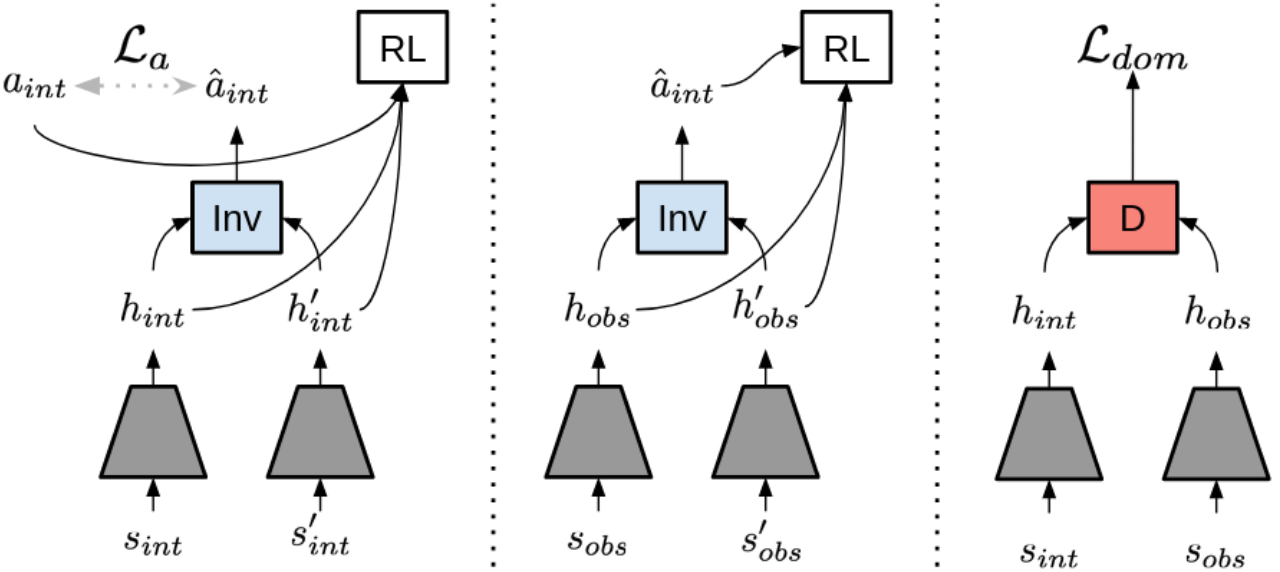
【论文笔记】基于强化学习的机器人动作模仿
基于强化学习的机器人动作模仿方法论文调研与笔记。
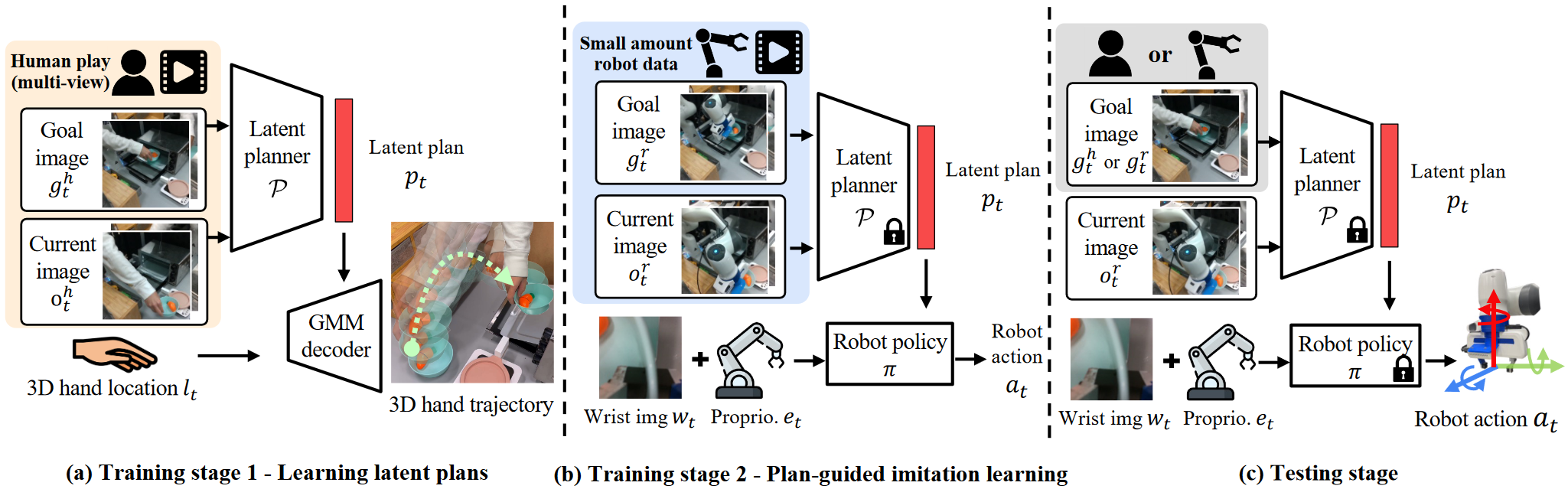
【论文复现】MimicPlay从人类演示中学习机器人技能
斯坦福大学李飞飞团队的通过观看人类动作进行长期模仿学习方法。

PCL库的安装与基本使用
C++使用最广泛的点云库
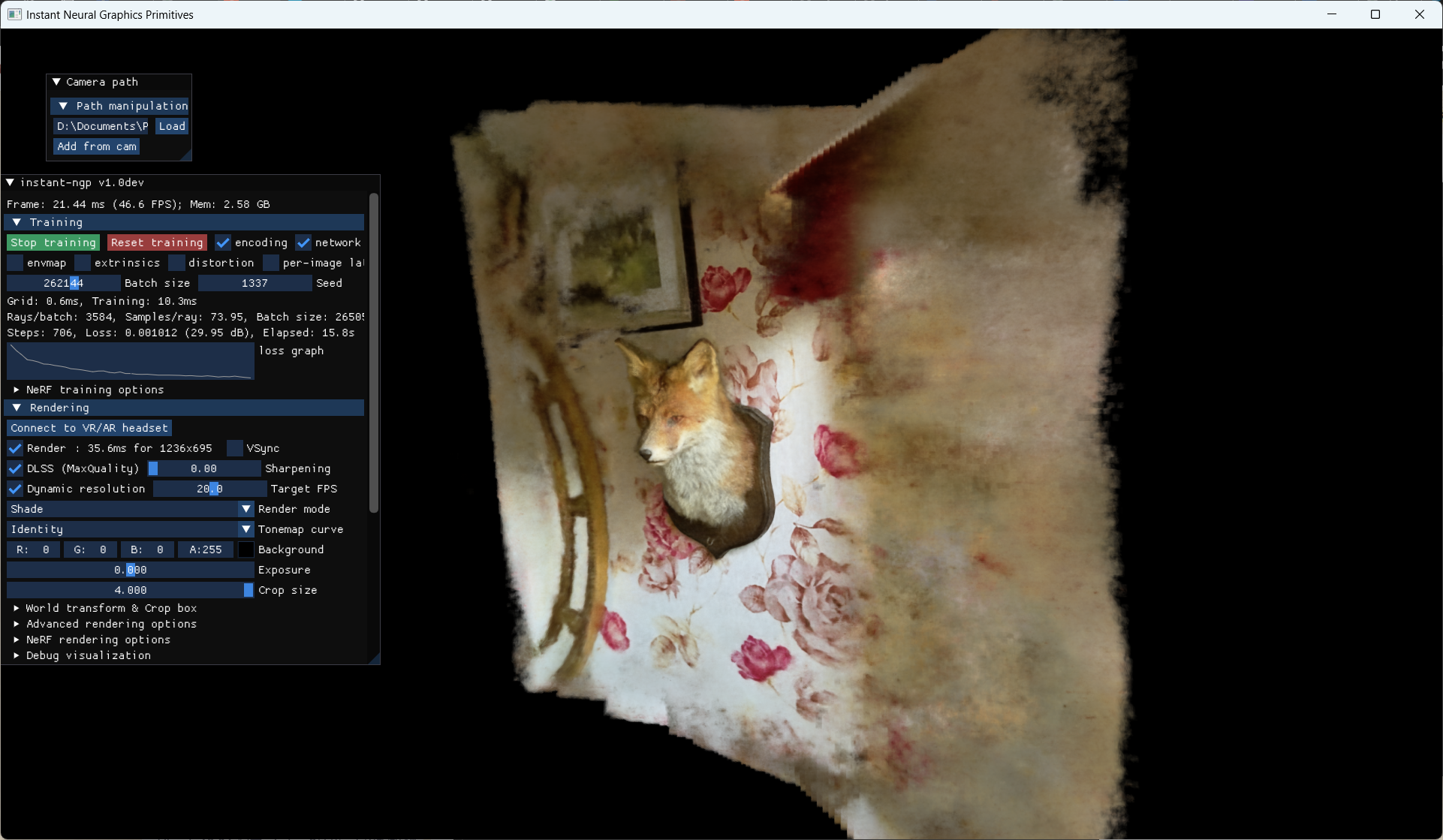
Nerf(instant-ngp)快速实现三维重建
Instant-NGP全称Instant Neural Graphics Primitives,它通过多分辨率哈希编码,解决了NeRF对全连接神经网络进行参数化时的效率问题,大大提升了网络的训练速度,使三维重建速度可以从几小时缩短到几秒钟。