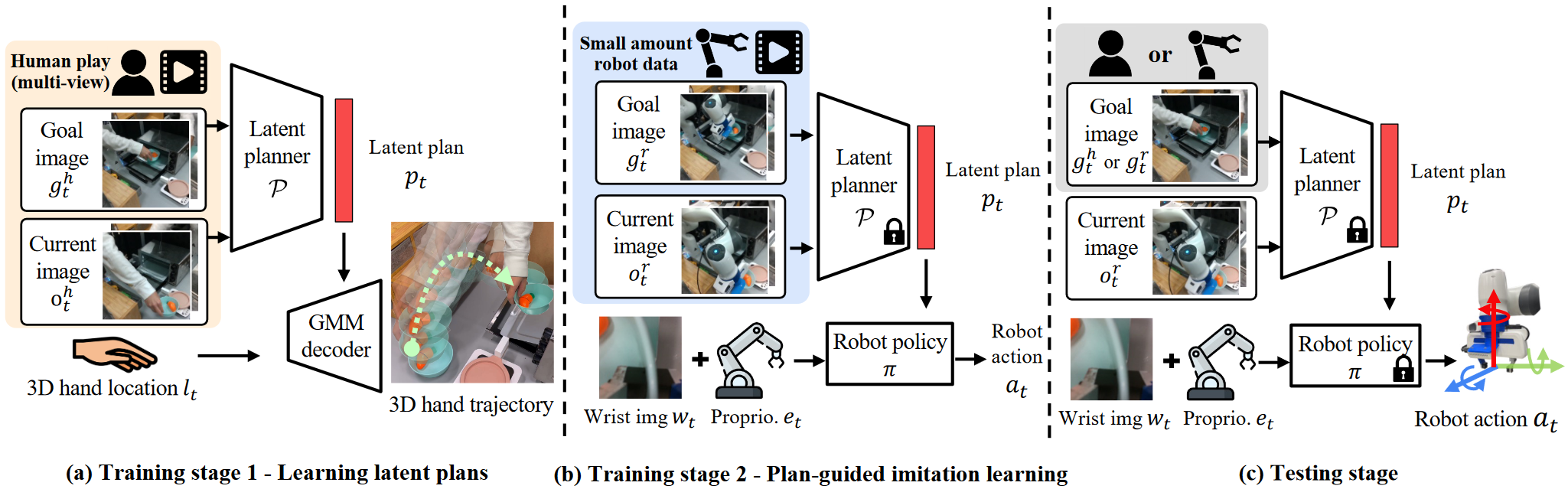
【论文复现】MimicPlay从人类演示中学习机器人技能
斯坦福大学李飞飞团队的通过观看人类动作进行长期模仿学习方法。

PCL库的安装与基本使用
C++使用最广泛的点云库
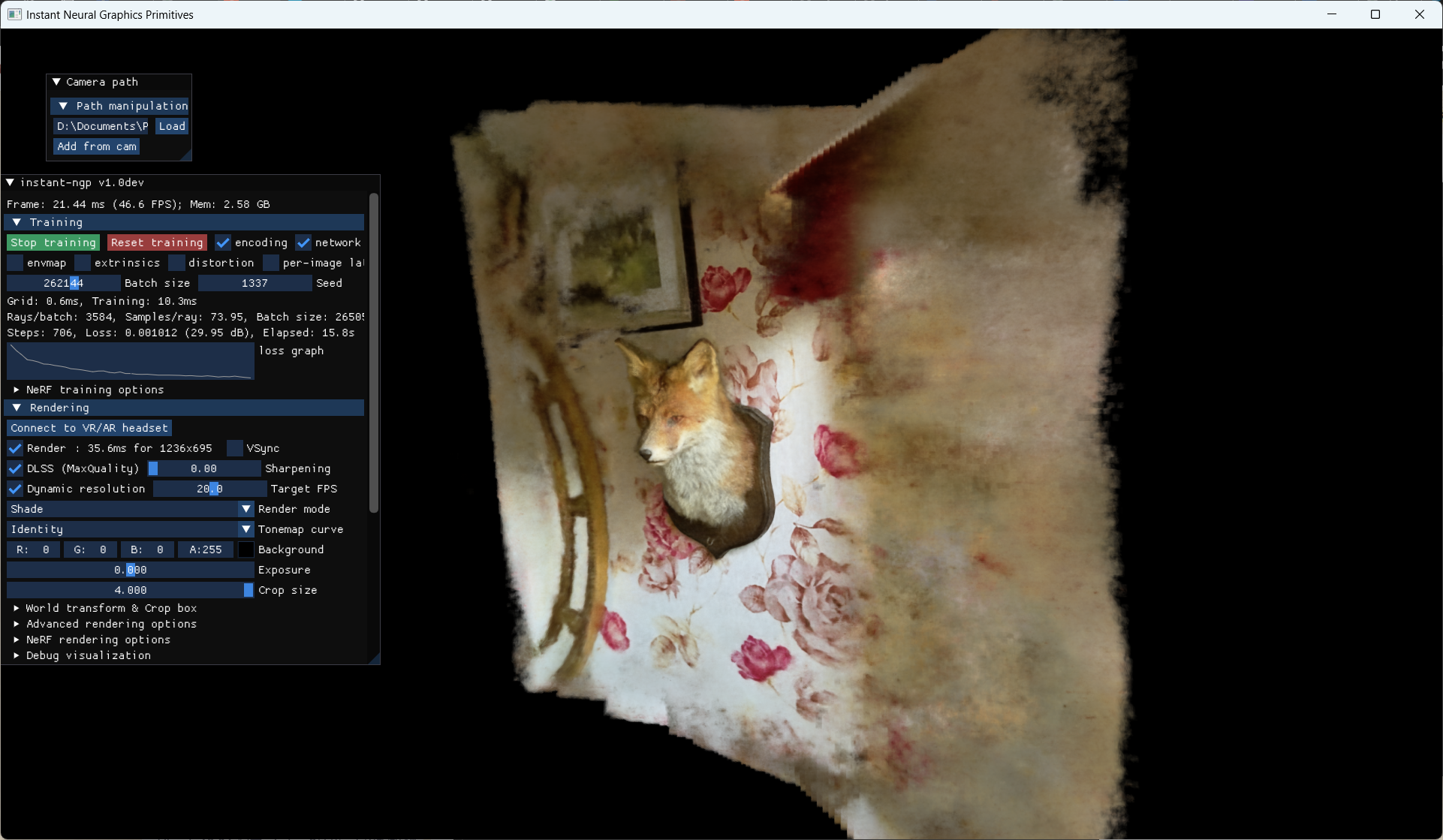
Nerf(instant-ngp)快速实现三维重建
Instant-NGP全称Instant Neural Graphics Primitives,它通过多分辨率哈希编码,解决了NeRF对全连接神经网络进行参数化时的效率问题,大大提升了网络的训练速度,使三维重建速度可以从几小时缩短到几秒钟。
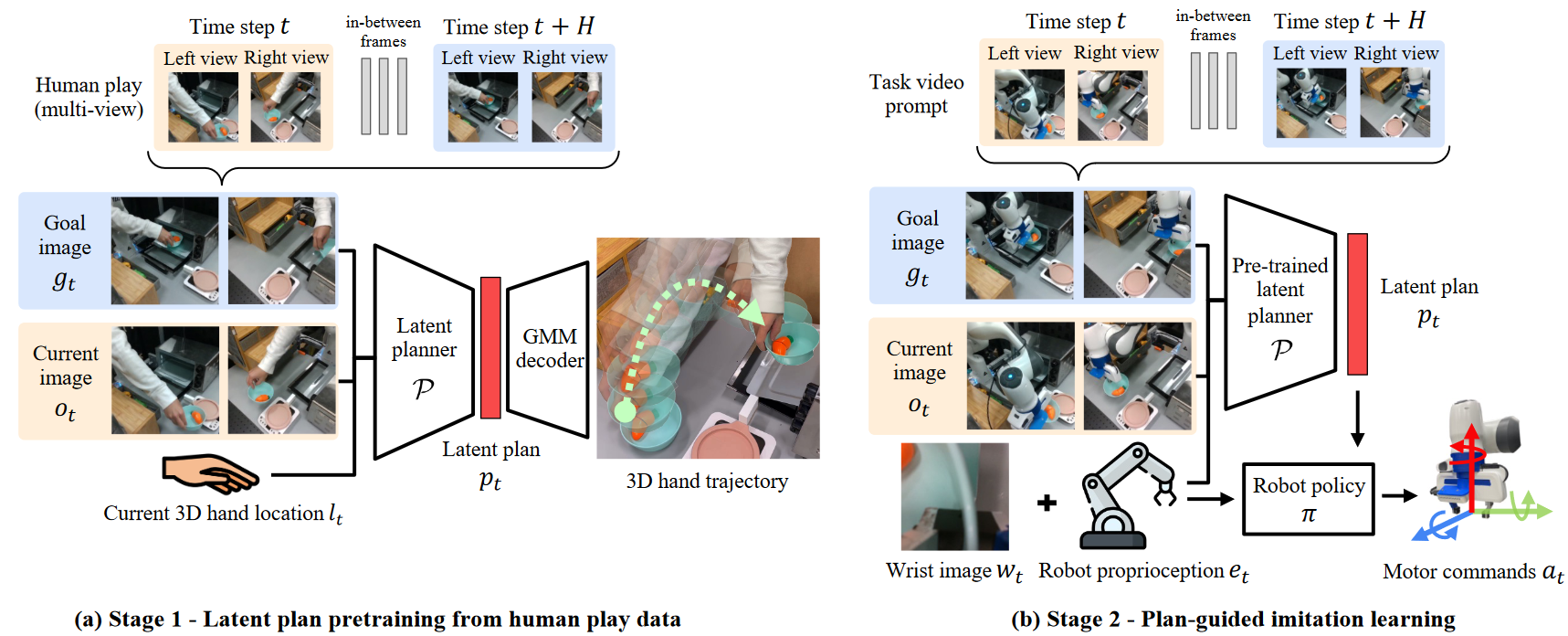
【模仿动作】从人类演示中学习机器人动作规划方法
从人类抓取物体的视频中学习机器人的动作生成与规划方法,相关的研究的调研。
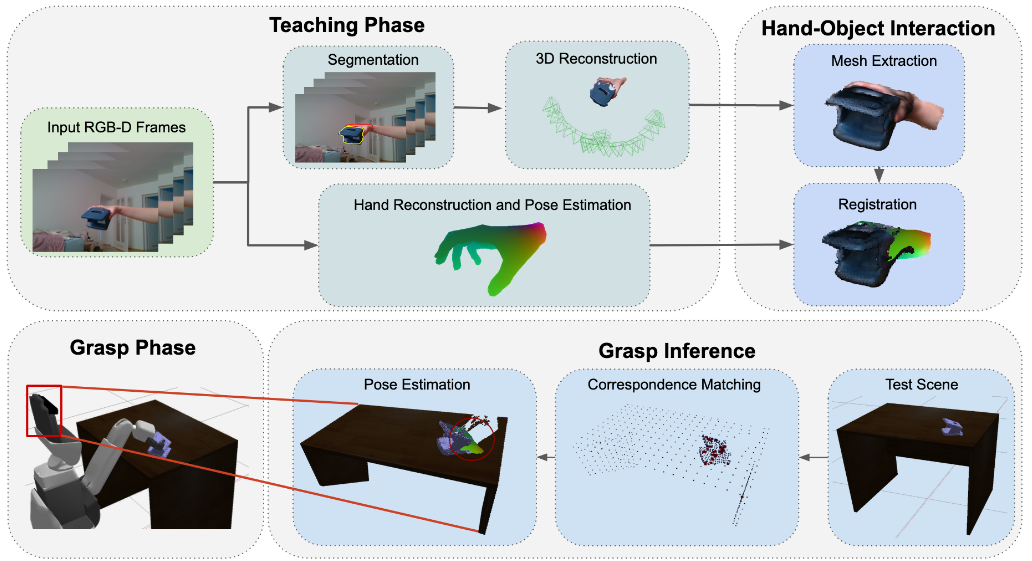
【模仿抓取】从人类演示中学习机械臂抓取
从人类抓取物体的视频中学习机器人抓取的相关工作调研。
【强化学习算法】近端优化策略PPO
介绍强化学习的一种基础算法,近端优化策略(Proximal Policy Optimization,PPO)
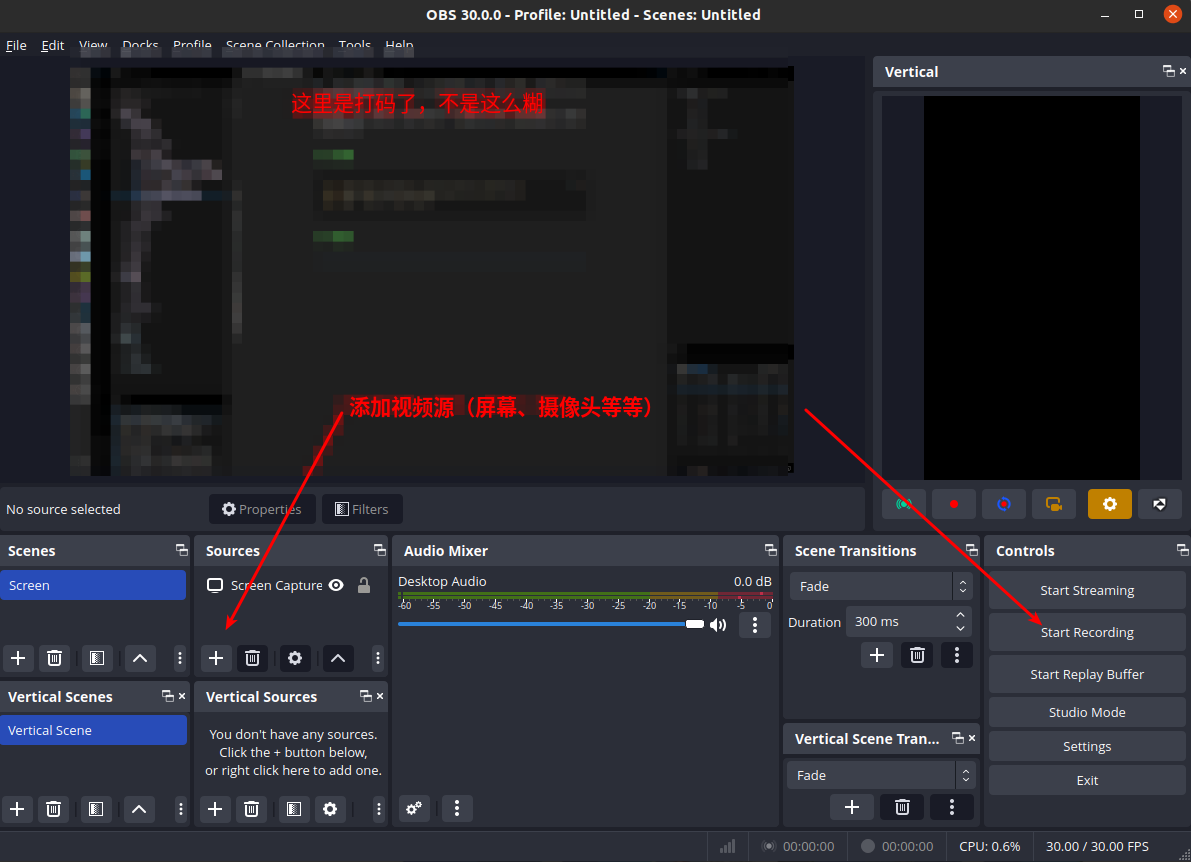
Ubuntu截图与录屏工具
Ubuntu上默认只能截屏不能截屏,且体验十分差,因此介绍两款个人常用的截屏和录屏软件。
ROS系统Buglist(不定时更新)
在使用ROS系统进行机器人实验中,遇到的各种错误信息汇总,不定时更新。