
Ubuntu使用OneDrive
之前一直使用坚果云做多设备同步,但是坚果云每个月只有1G流量,不够用。因此改到OneDrive,本文记录在Ubuntu上进行OneDrive的配置过程。
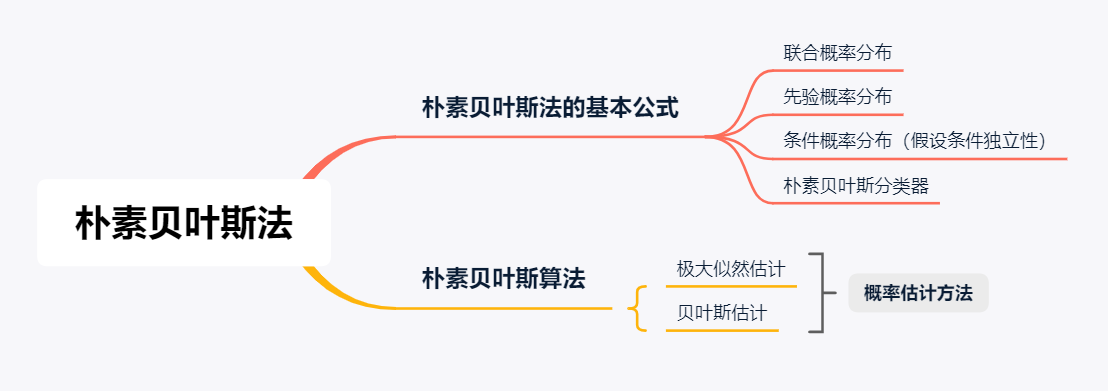
【统计学习方法笔记04】朴素贝叶斯法
统计学习方法的学习笔记
Terminator终端终结者常用快捷键
一个比较好用的终端工具。
多版本OpenCV共存安装
由于跑一些项目的时候,由于时代问题,有些程序是使用opencv2写的,现在大家普遍都安装的opencv4,由于项目代码繁多,修改源码过于麻烦,因此考虑多版本opencv共存安装。

Docker的安装与常用命令
环境配置有时非常麻烦,而且有很多程序的依赖环境会和本地环境冲突,为了避免这些情况,docker就是一个比较好的解决方案。
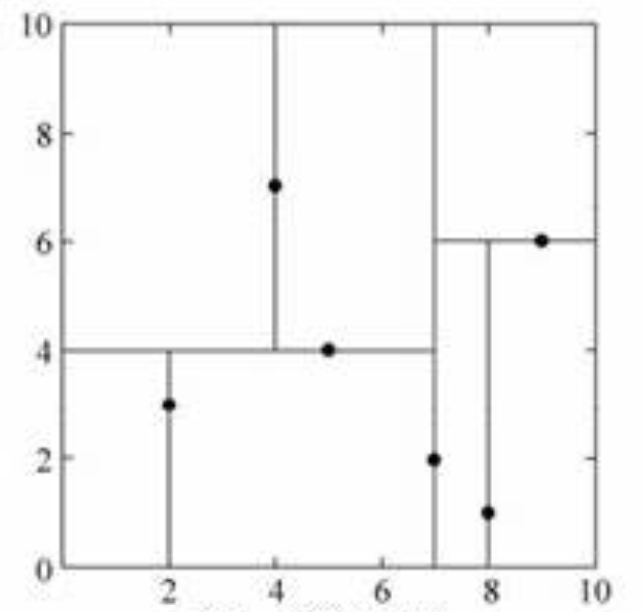
【统计学习方法笔记03】k近邻法
近邻算法,假设给定了一个训练数据集,其中实例类别已定。分类时,对新的实例,根据其k个最近邻的训练实例的类别, 通过多数表决等方式进行预测。因此,k近邻法不具有显式的学习过程。

使用内网穿透SakuraFrp远程连接服务器
不想使用向日葵和todesk等工具远程连接桌面,而且个人电脑和服务器也不在一个局域网下,想要远程连接服务器,因此考虑使用内网穿透。
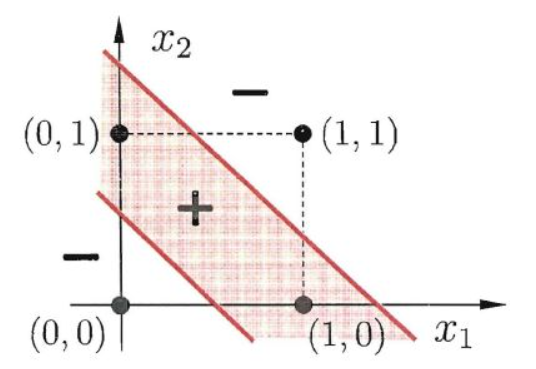
【统计学习方法笔记02】感知机
感知机是二类分类的线性分类模型,输入为实例的特征向量,输出为实例的类别,旨在求出将训练数据进行线性划分的分离超平面。
【统计学习方法笔记01】统计学习概论
统计学习是关于计算机基于数据构建概率统计模型,并运用模型对数据进行预测与分析的一门学科。本文是对李航老师的《统计学习方法》一书学习笔记。
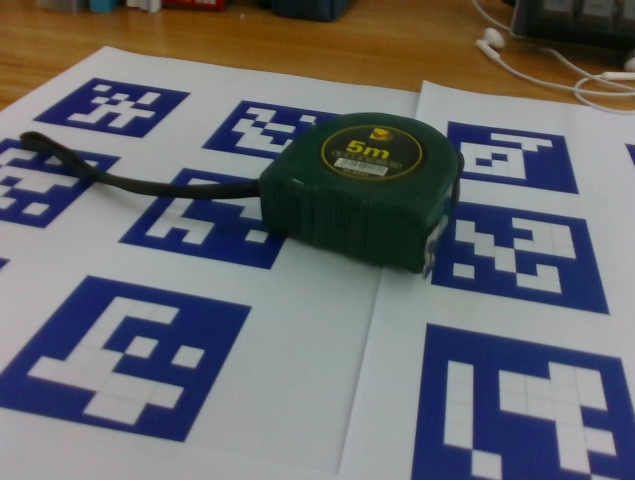
制作自己的Linemod数据集(ObjectDatasetTools)
目前正在学习6D位姿估计算法,该领域最常用的数据集就是LineMod数据集,但是只在数据集上测试还是不够,想要实际应用还需要搭建自己的数据集。