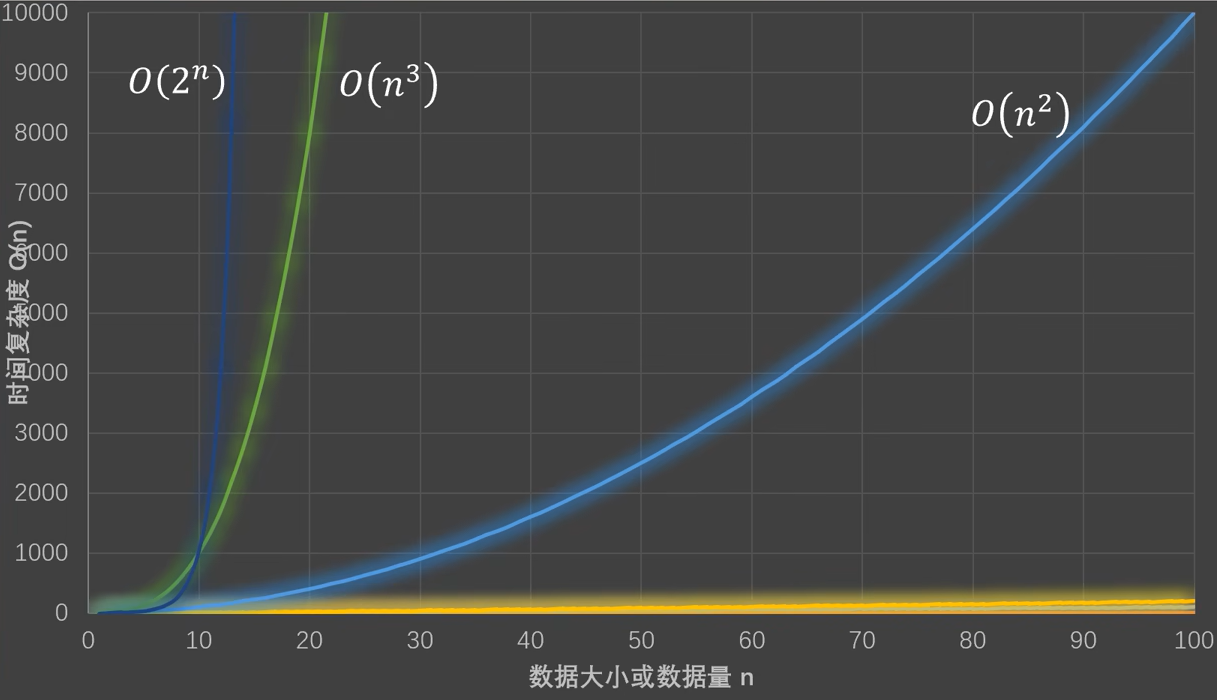
简单理解时间复杂度
解释时间复杂度如O(n)的概念,以及相关时间复杂度的计算方法。

【深度学习笔记04】改善训练效果与训练速度的一些要素
改善神经网络的训练效果有很多方面,比如避免欠拟合和过拟合,利用正则化等等。不同的方法其作用效果也不同。

【深度学习笔记03】线性回归与Softmax回归及其损失函数
深度学习的线性回归,基本的优化算法,以及Softmax回归和损失函数的实现。
【深度学习笔记02】数据操作的实现与线性代数基础
介绍了使用pytorch和pandas实现基本数据的操作方法,以及使用torch进行基本线性代数运算、求导计算的方法。
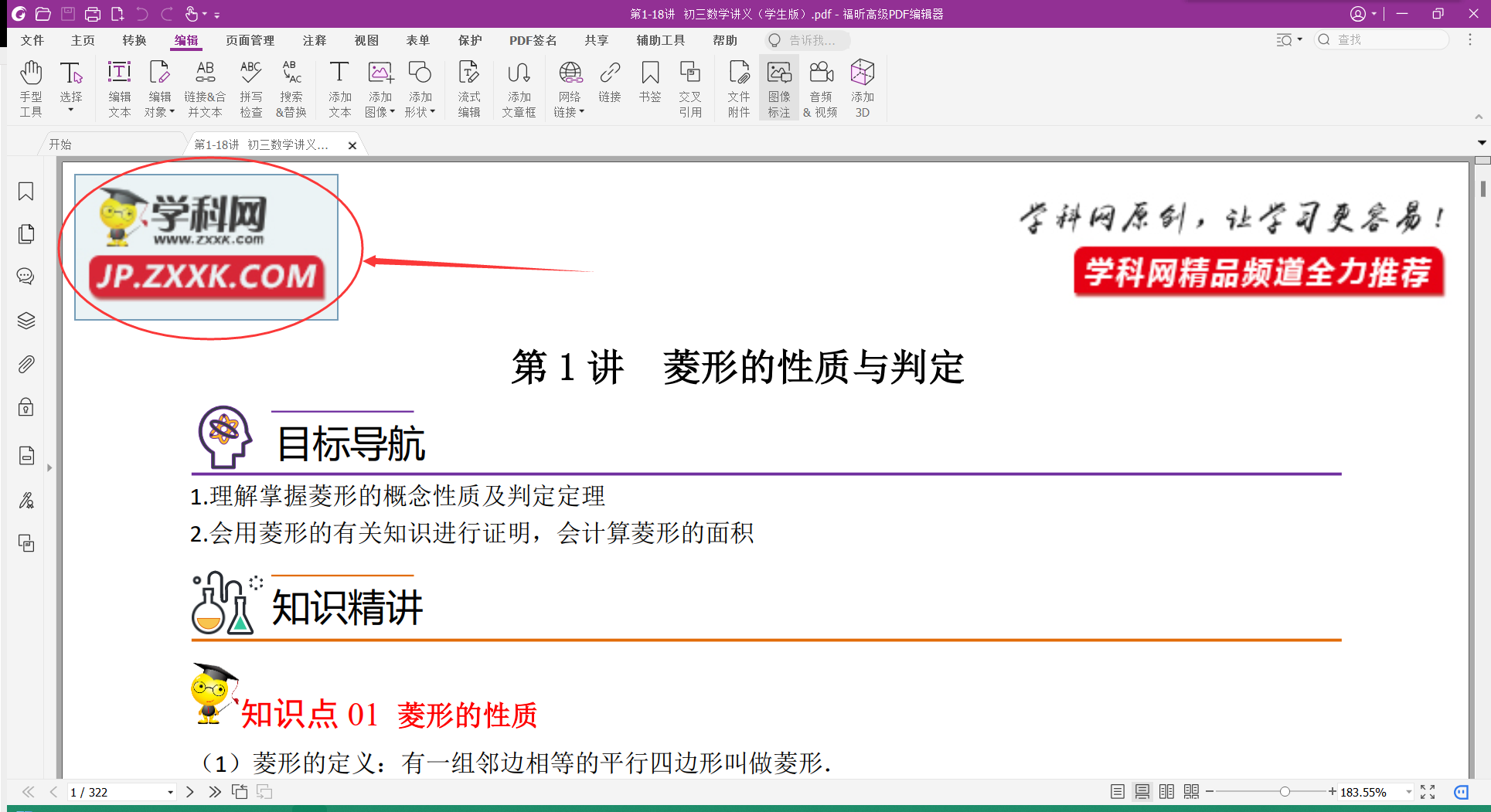
PDF去水印方法总结
使用福昕PDF编辑器进行去水印操作,包括常规水印、背景水印、文字水印,以及其它水印的去除方法。

记录Ubuntu安装后的系统配置、常用软件安装过程
记录一次ubuntu安装后的配置过程,这些天装了双系统,在树莓派上也鼓捣过,总结如下。
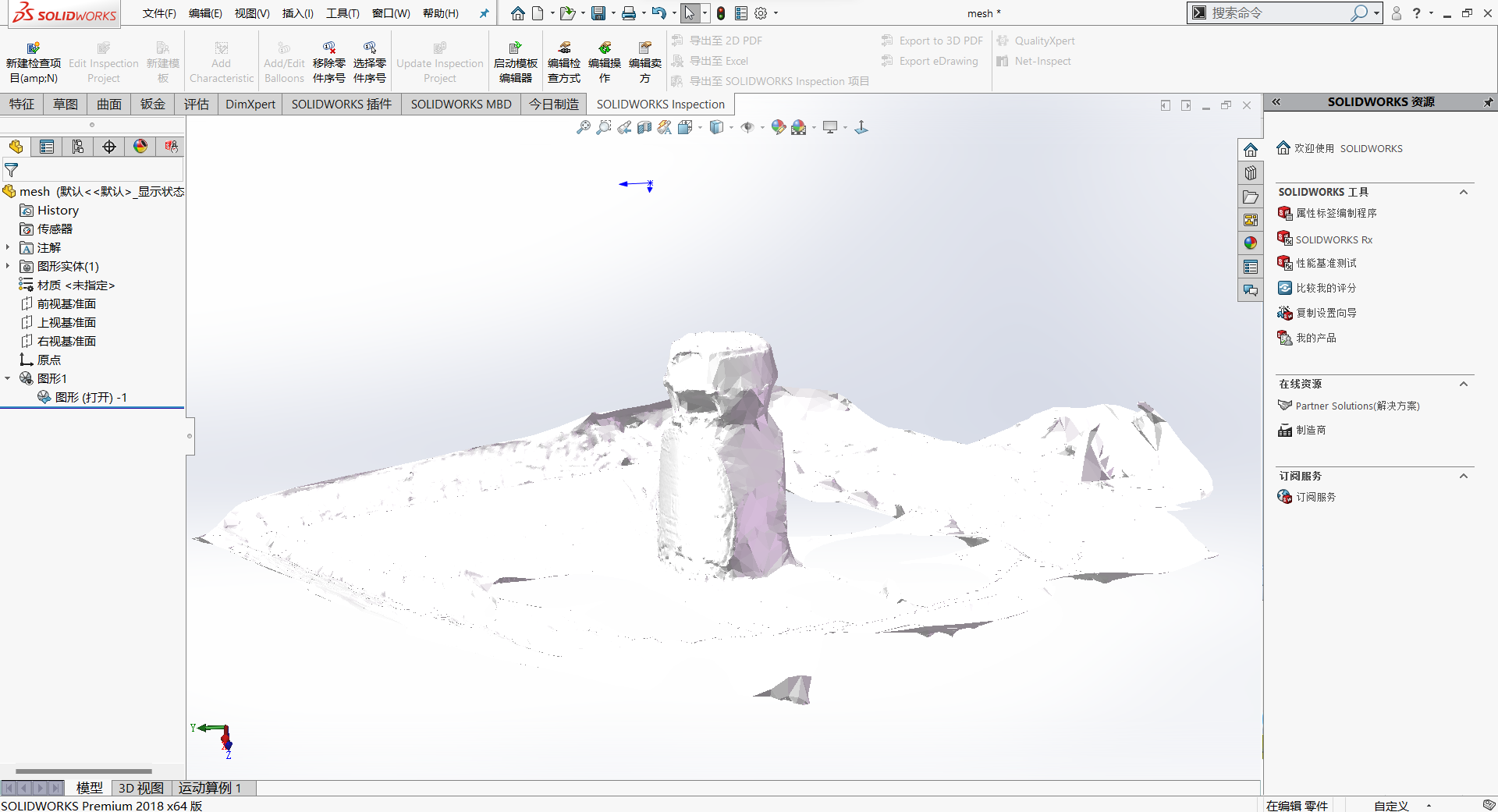
COLMAP+OpenMVS实现物体三维重建mesh模型
COLMAP是一种通用的运动结构(SfM)和多视图立体(MVS)工具,具有图形和命令行界面。OpenMVS是目前的三维重建的框架中,复原效果较好的,而且提供自动化的脚本。

Python复习笔记5——常用模块
Python具有非常丰富有用的内建模块和第三方模块,可以快速方便的实现很多常用功能。
Python复习笔记4——文件和目录操作
本文总结了python读写文件的基本操作,以及常用的os对目录和文件的常用操作,如路径获取、路径拼接、文件重命名、文件移动等。总结了常用的JSON。
Python复习笔记3——测试与调试技巧
在程序运行过程中,总会遇到各种各样的错误。有的错误是程序编写有问题造成的,有的错误是用户输入造成的,还有的错误是完全无法在程序运行过程中预测的,Python内置了一套异常处理机制,来帮助我们进行错误处理。