【ROS学习笔记】(二)工作空间与功能包的创建
工作空间的概念
工作空间是存放工程开发相关文件的文件夹,类似windows中使用ide时创建的工程。
工作空间包括的文件夹
^a357c1
- src:代码空间
- build:编译空间,编译过程中的中间文件,一般用不到
- devel:开发空间,放置开发过程中的可执行文件、库等
- install:安装空间
创建工作空间
1. 创建工作空间
1 | mkdir -p ~/catkin_ws/src |
2. 编译工作空间
1 | cd ~/catkin_ws |
3. 设置环境变量
1 | source devel/setup.bash |
4. 检查环境变量
1 | echo $ROS_PACKAGE_PATH |

创建功能包
catkin_creat_pkg <package_name> [depend1] [depend2] [depend3]
1. 创建功能包
1 | cd ~/catkin_ws/src |
注:功能包要放在src文件夹下,同一个工作空间不能有同名的功能包
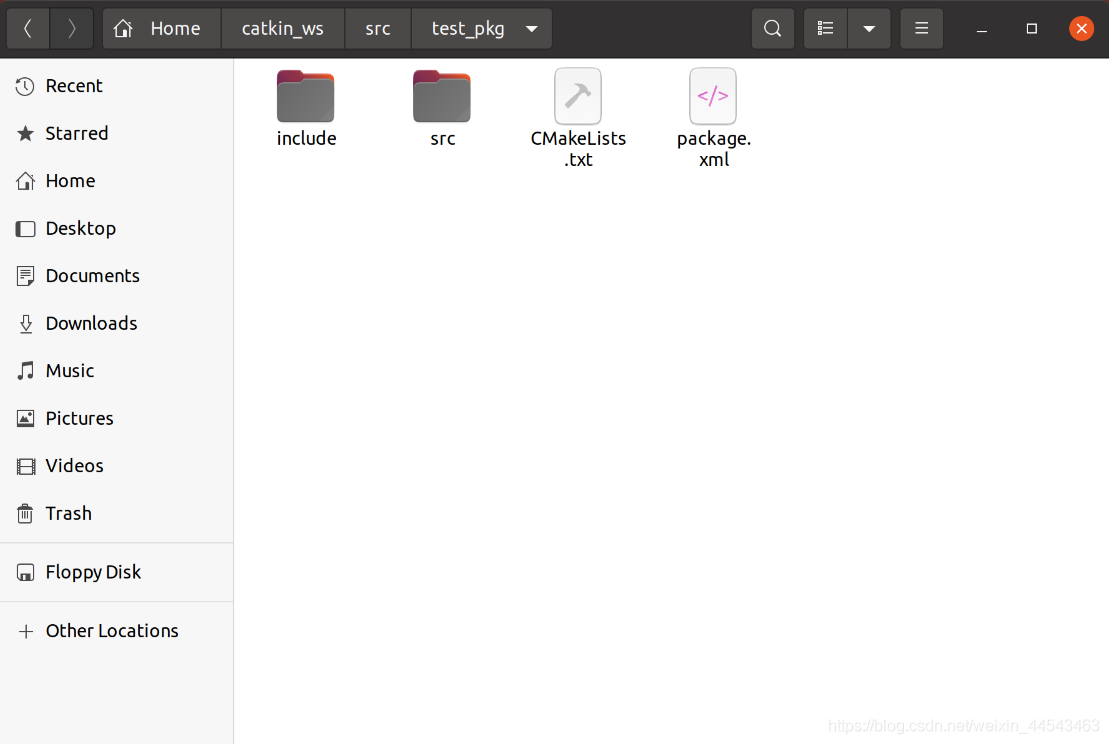
创建功能包后,在功能包test_pkg文件夹下有src、include文件夹和package.xml、CMakeLists.txt文件
(1)src文件夹:放置代码文件
(2)include文件夹:放置头文件
(3)package.xml:与功能包相关的信息
(如名字、版本号、许可证、作者信息、功能包的依赖信息等)
(4)CMakeLists.txt:描述功能包的编译规则
如果要写python代码,需要在程序包下新建scripts文件夹,并将python代码写在其中。
1 | mkdir scripts |
2. 编译功能包
1 | cd ~/catkin_ws |
ps. 如果进行某些操作后重新编译工作空间出错时,可以尝试使用
catkin_make clean
 微信支付
微信支付 支付宝
支付宝
评论