RobotStudio碰撞检测的设定
单击创建碰撞检测进行创建,创建完成后,ObjectA与ObjectB为进行检测的两个组,如果两个组的物体发生碰撞,则会发生颜色变化。
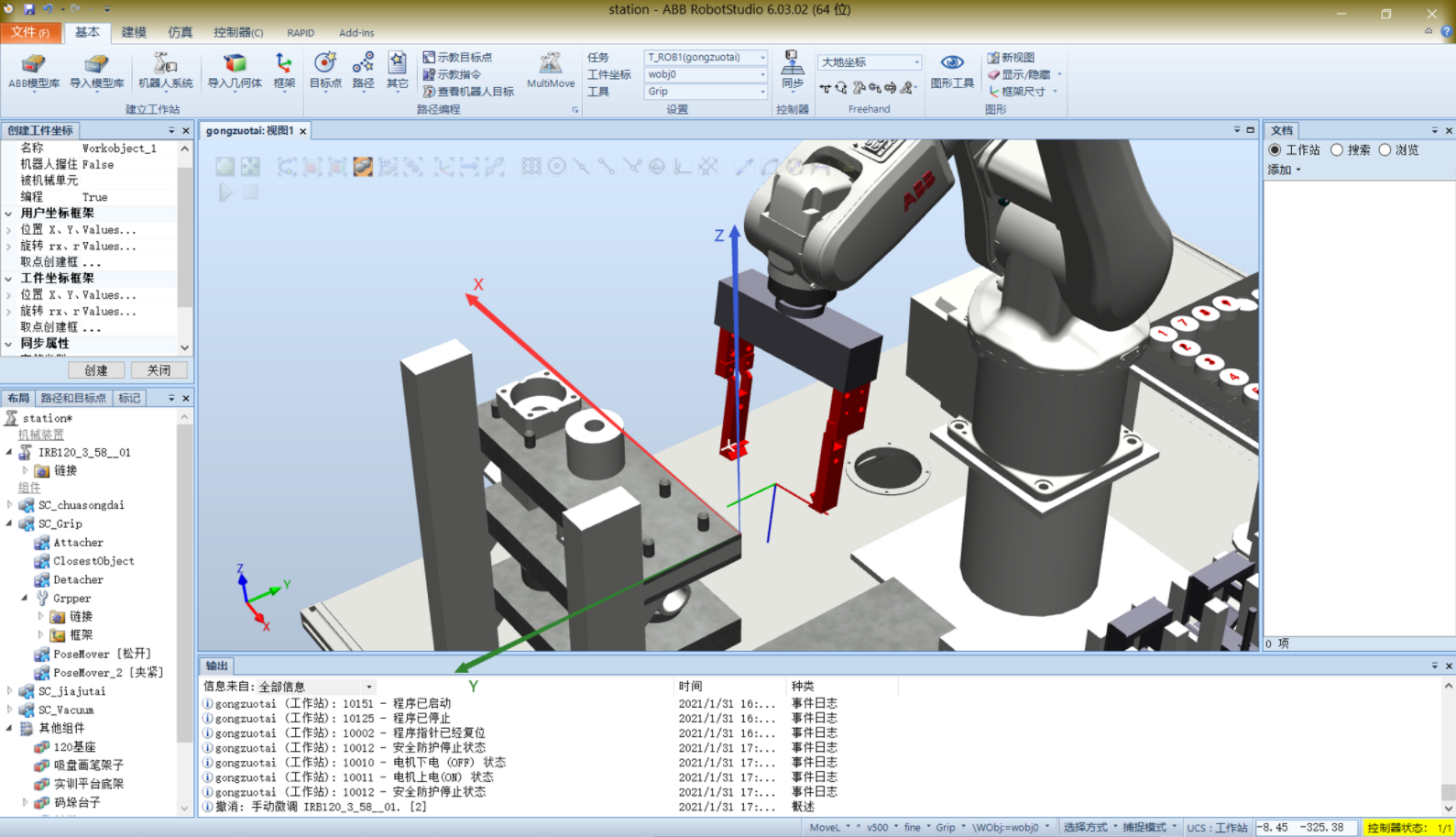
RobotStudio机器人运行路径的创建与仿真
本文在一个已经搭建好机械模型,同时完成机器人系统的创建后的机器人运行路径的创建过程。工程文件已上传到网盘,包括:初始工程文件(03Practice_init.rspag)、完成后的工程文件(03Practice.rspag)、模型文件。
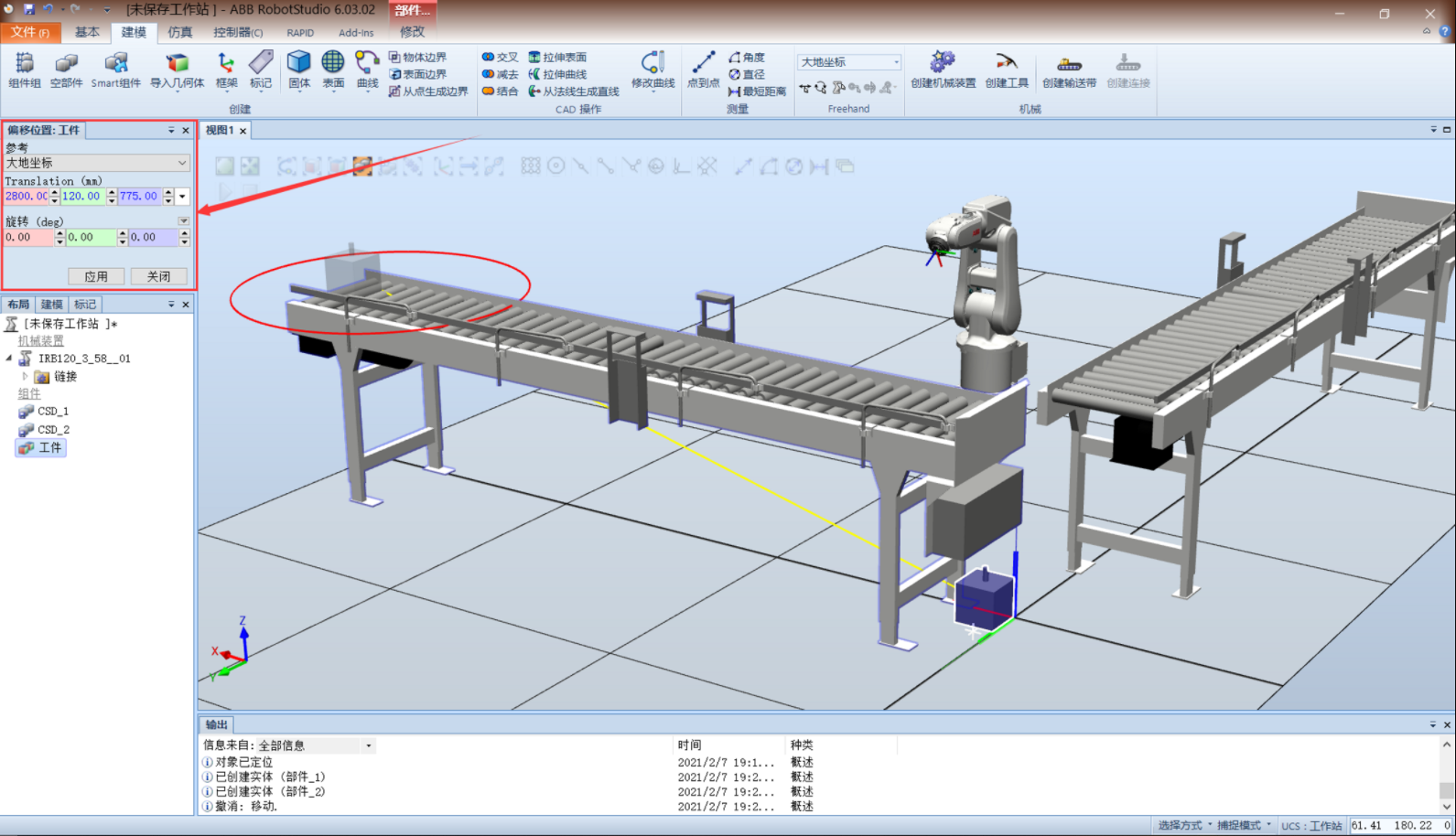
RobotStudio双传送带系统的搭建
首先搭建系统的机械结构。导入两个传送带,将第二个传送带以z轴旋转90°,再沿y轴偏移-3200mm。导入机器人IRB120,将其移动到合适的位置上。创建工件的模型...
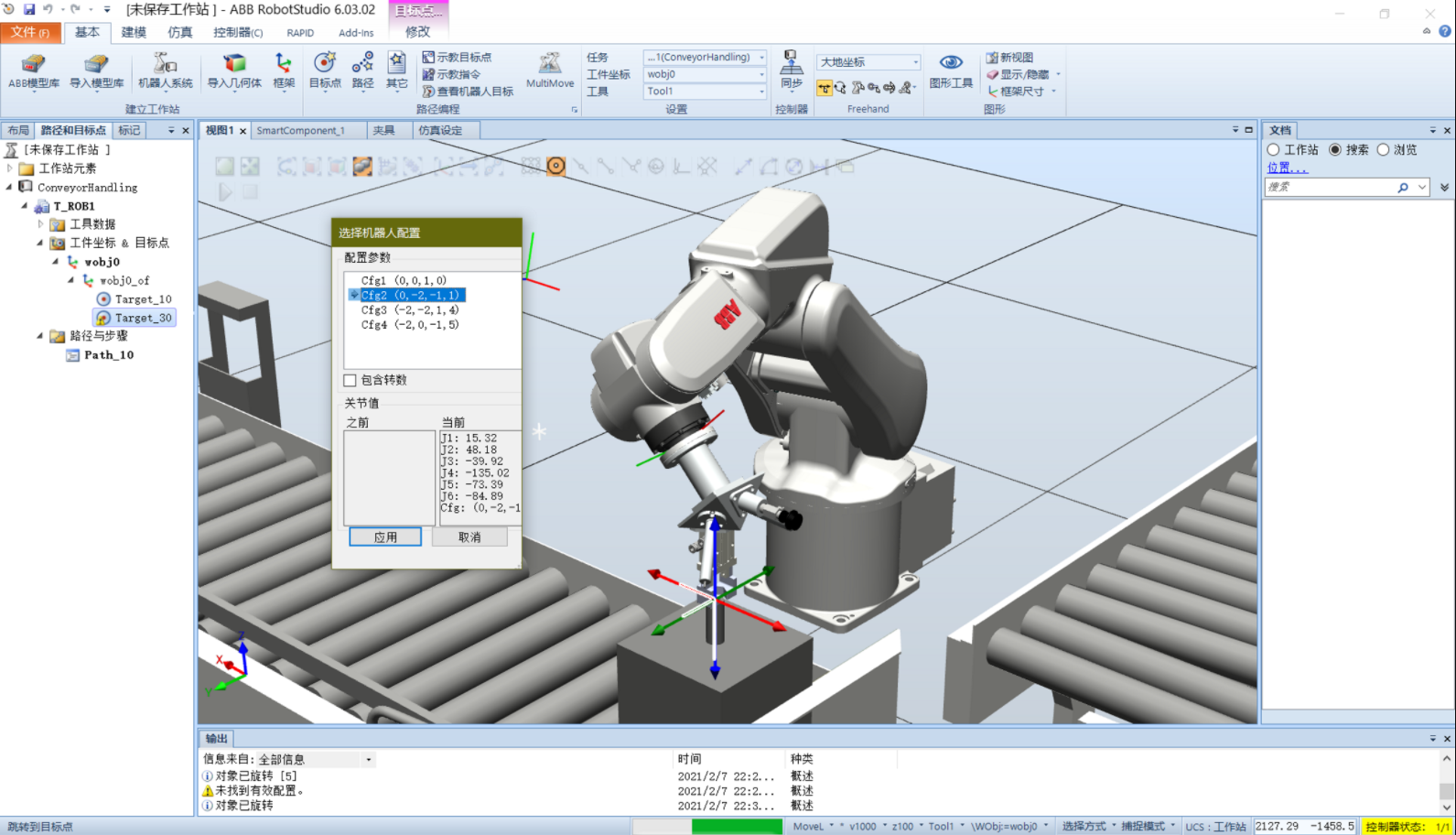
RobotStudio创建目标点时出现未找到有效配置的问题
RobotStudio在使用路径和目标点的创建目标点时,有时会出现无法跳转到目标点的问题,错误为未找到有效配置。解决方法1:在基本-设置选择正确的工具坐标,例如夹具的工具坐标。
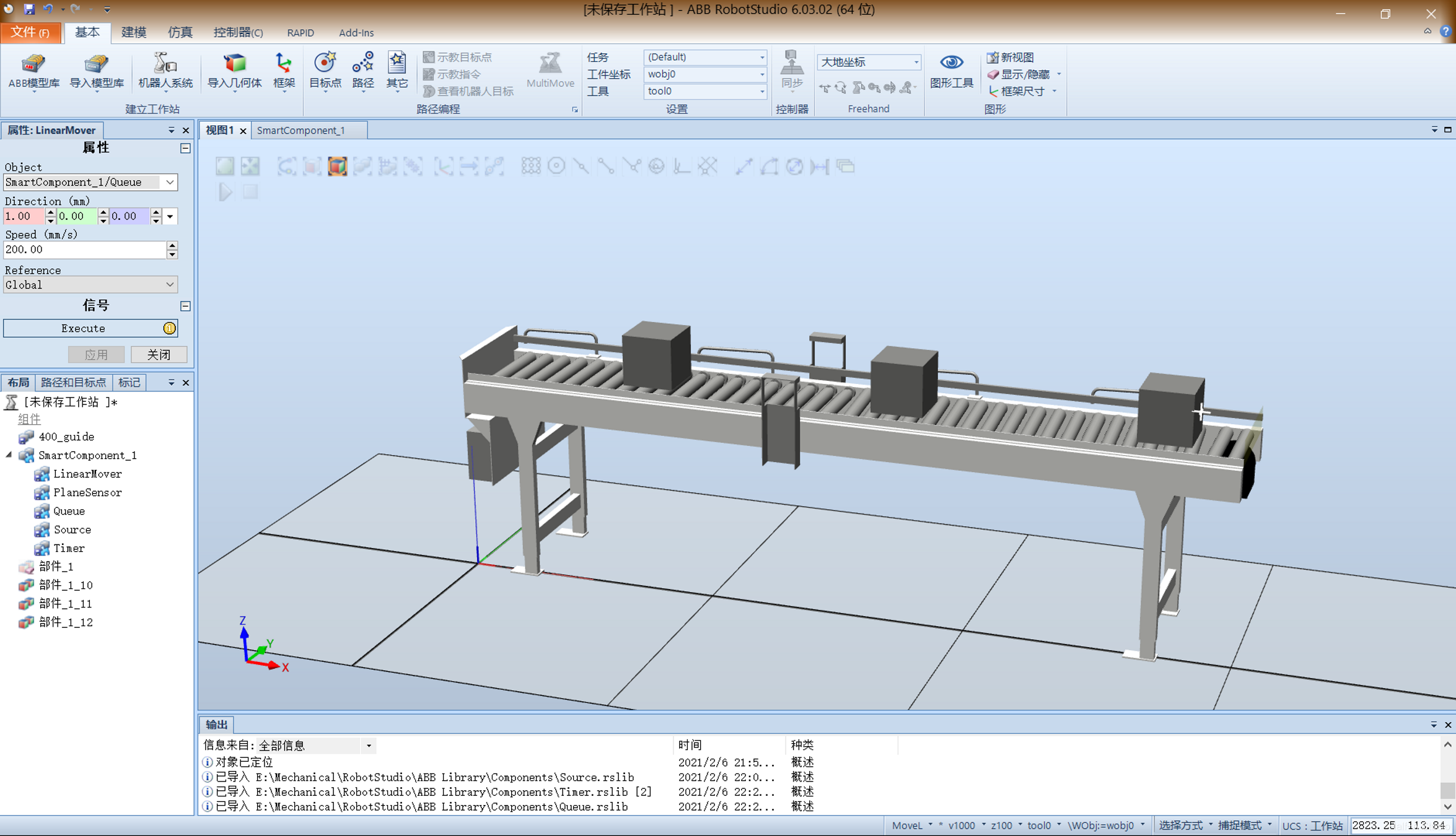
RobotStudio传送带设计
新建一个工作站,从设备中导入一个传送带。创建一个正方体,作为传送带的传送对象。将小方块拖动带传送带上我们要的位置处,可以借助捕捉与设定位置精确定位小方块的位置...
RobotStudio关于Ctrl+鼠标左键拖动速度慢的解决方法
使用ABB RobotStudio的过程中,有时会遇到鼠标拖动平移视角的速度突然变慢的问题:工作站空白处右键,点击查看全部或查看中心。这样就可以解决此问题
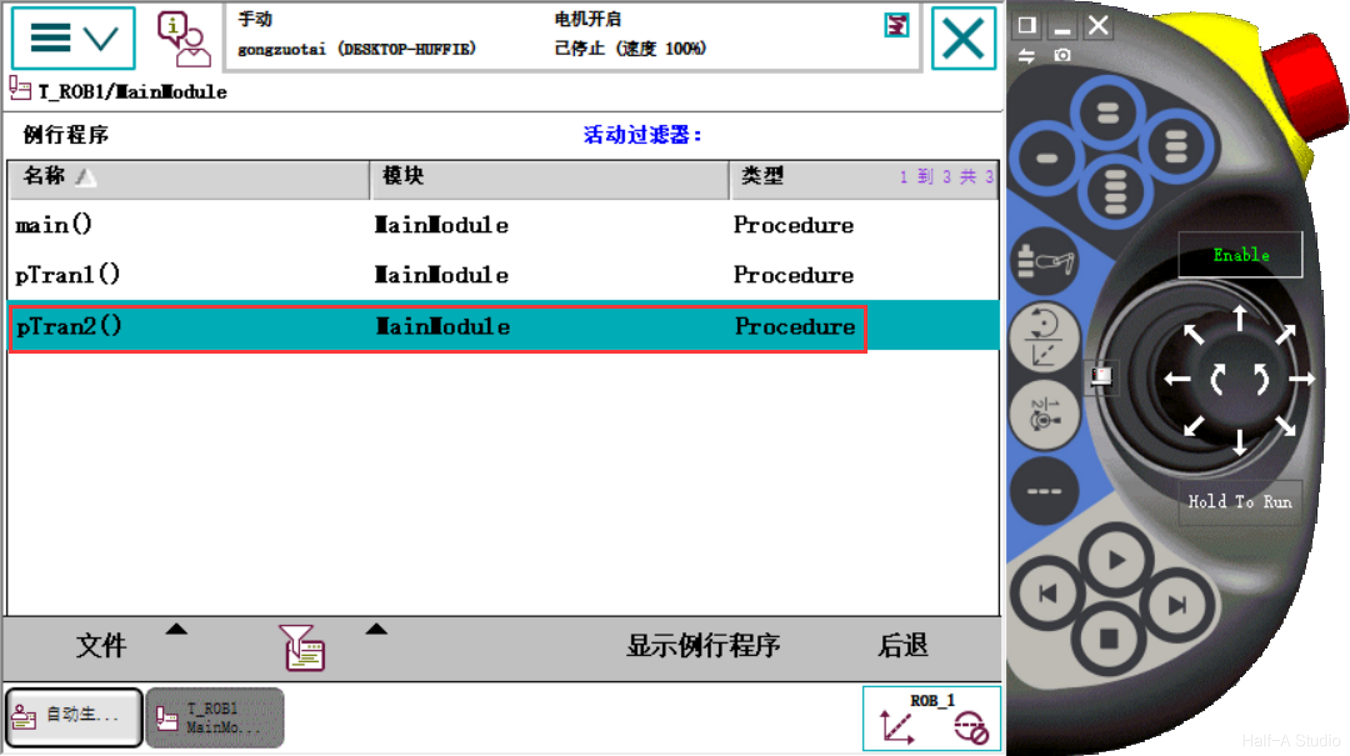
【RobotStudio学习笔记】(十)模块化程序
当程序比较复杂,或者程序内存在重复的部分时,模块化程序设计往往是比较可行的办法。在RobotStudio中可以通过在主程序中调用不同的例行程序,达到使代码逻辑清晰的目的。
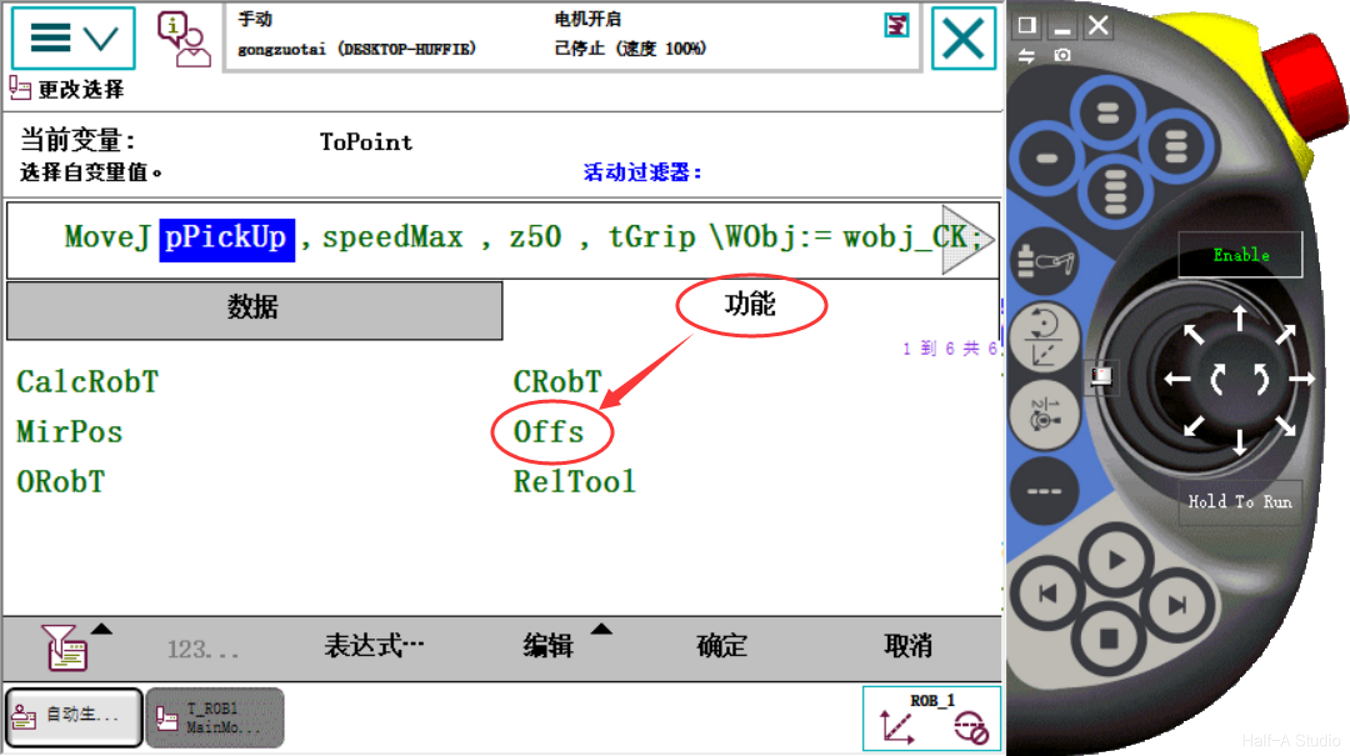
【RobotStudio学习笔记】(九)坐标偏移设置
Offs指令可根据当前所选工件坐标以及基准点进行坐标偏移。点击要偏移的robtarget数据,选择功能-Offs即可进行坐标偏移设置。
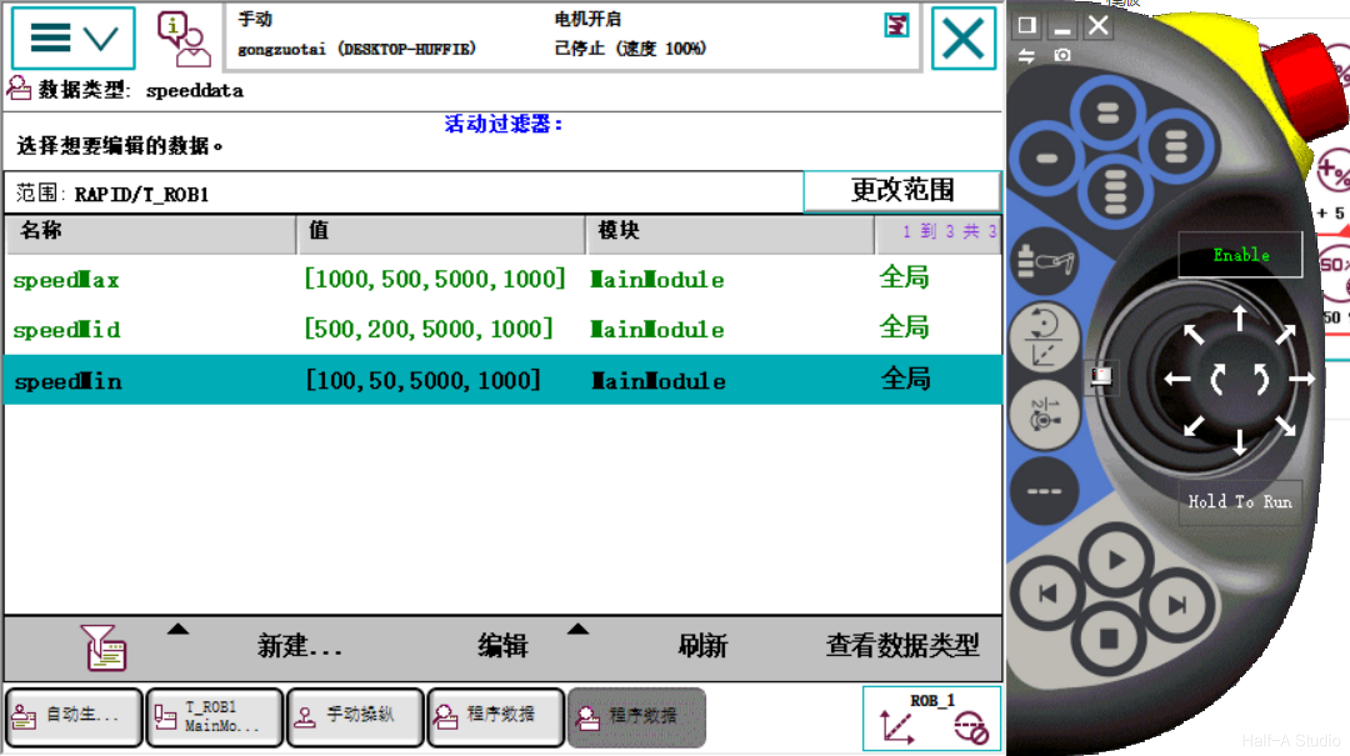
【RobotStudio学习笔记】(八)速度设置
在手动模式下,最大速度受到限制,最大时250mm/s。而程序中v1000在仿真和实际中是十分快的,需要设置机器人的运动速度,并且设置延时时间。
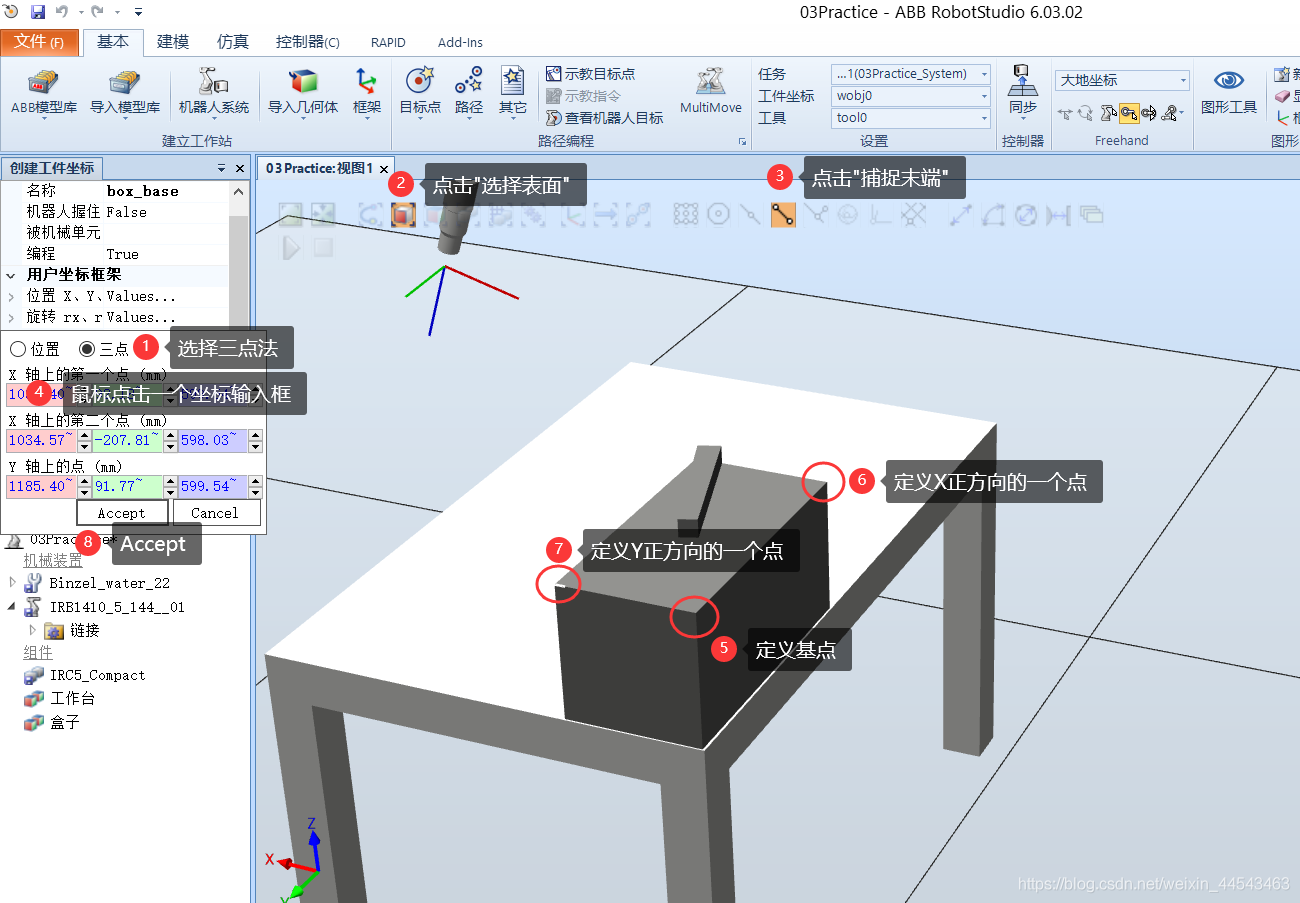
【RobotStudio学习笔记】(七)工件坐标
在目标工作台的任意位置,任意角度创建一个直角坐标系,把这个坐标系叫做工件坐标。在不同的位置创建工件坐标系,就可以实现,相同的程序在不同的位置实现相同的加工。