ROS2_Rviz2显示URDF模型
一、实验环境及准备
测试环境:
- Ubuntu 22.04 LTS
- ROS2 Humble
准备:
- URDF 及对应的 Mesh 文件
(本文使用的是从 Solidworks 导出的 URDF,具体导出方法可参考此文章)
依赖:
- 确保自己的 ROS2 安装正常(能够运行 turtle demo 即可)
- 安装
joint_state_publisher和robot_state_publisher
1 | sudo apt install ros-$ROS_DISTRO-joint-state-publisher-gui ros-$ROS_DISTRO-robot-state-publisher |
二、工作空间与功能包配置
1 | mkdir ros2_ws |
为了方便实现,避免对 launch,package,setup.py 等文件进行过多修改混乱,可以在本文在 Github 上传的代码(https://github.com/HaofeiMa/urdf_ros2_rviz2)基础上修改,以满足自己需求,该代码为 UR5e 机械臂+Inspire Hand 灵巧手模型:
1 | git clone https://github.com/HaofeiMa/urdf_ros2_rviz2.git |
完成之后,可以首先测试一下是否可以正常 build 以及显示现有模型:
1 | colcon build |
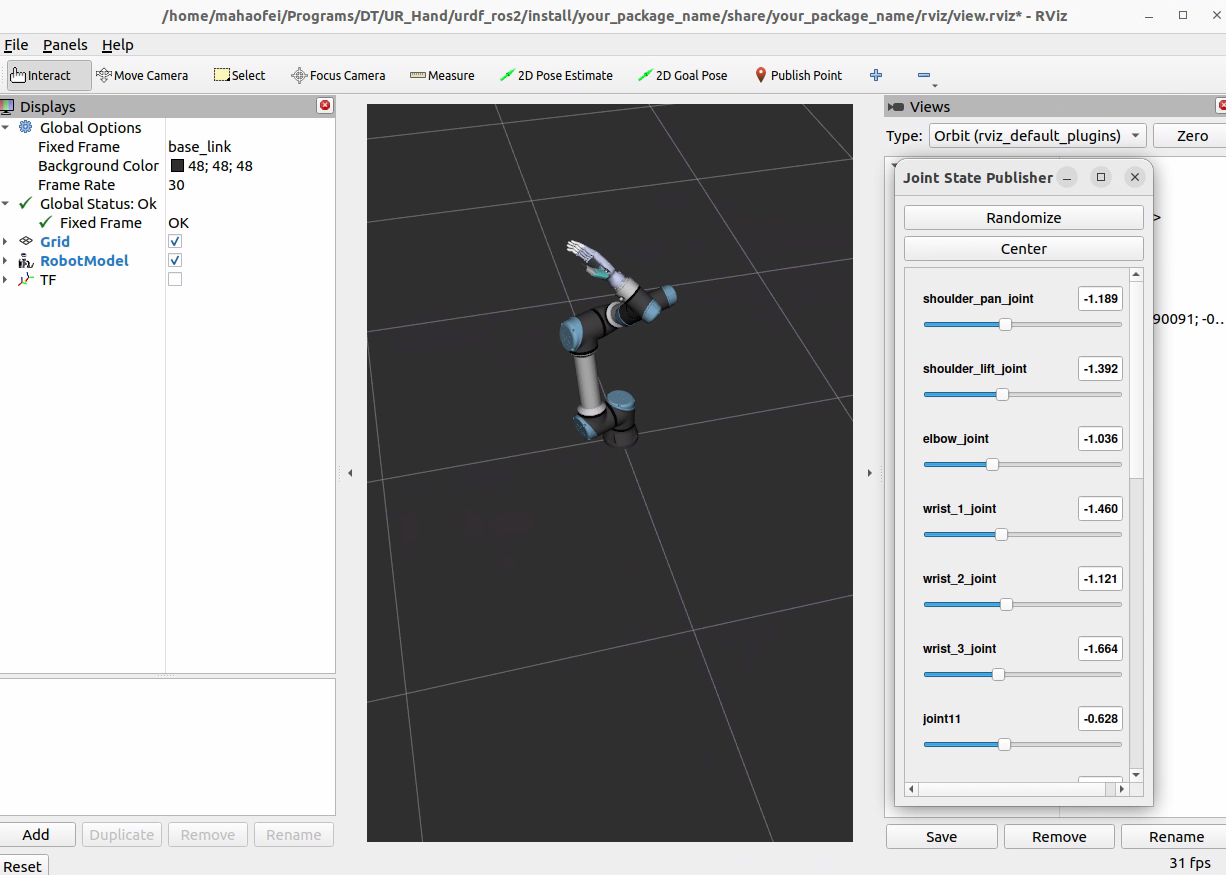
应该可以看到 Rviz2 界面以及现有模型。
三、修改功能包
(1)创建功能包
创建一个自己的 package,并且借鉴刚才 clone 的部分代码:
1 | ros2 pkg create your_package_name --build-type ament_python |
(2)复制文件
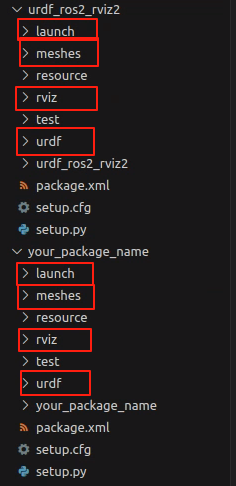
将 urdf_ros2_rviz2 目录下的 launch, meshes, rviz, urdf 四个文件夹,拷贝到新的 your_package_name 目录下。
(3)修改 setup.py
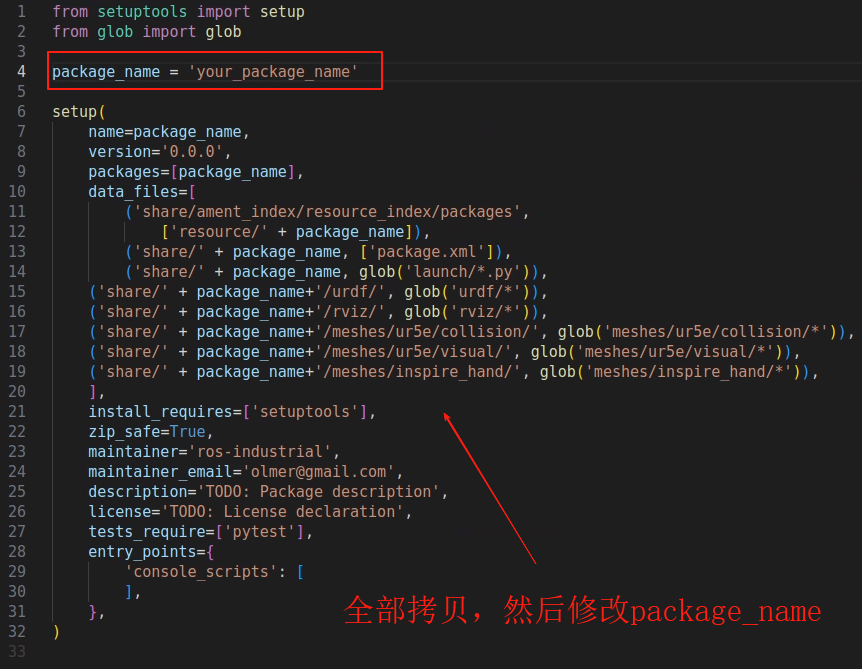
将 urdf_ros2_rviz2 中的 setup.py 文件代码全部拷贝过来,然后修改:
1 | # 第4行 |
(4)修改 package.xml
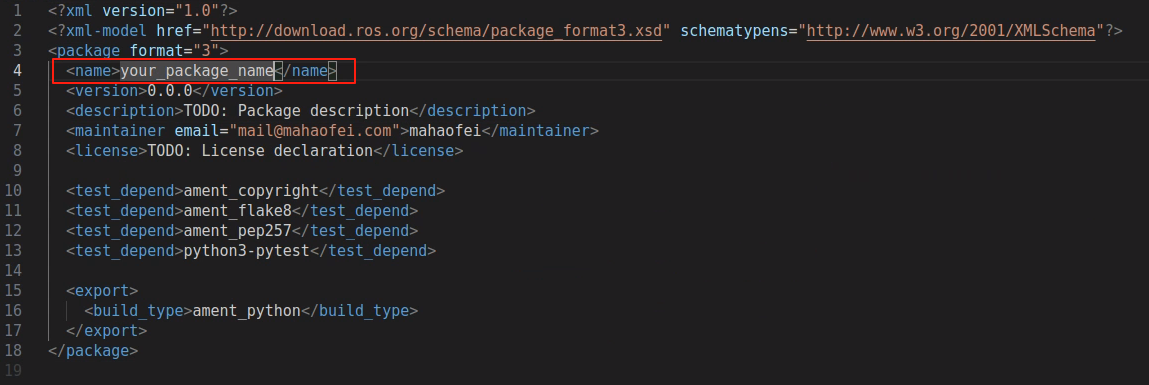
将 urdf_ros2_rviz2 中的 package.xml 文件代码全部拷贝过来,然后修改:
1 | <!-- 第4行 --> |
(5)复制 Meshes 文件
将你的 mesh 文件全部复制到 meshes 文件夹中,并将原来的 mesh 文件删除。
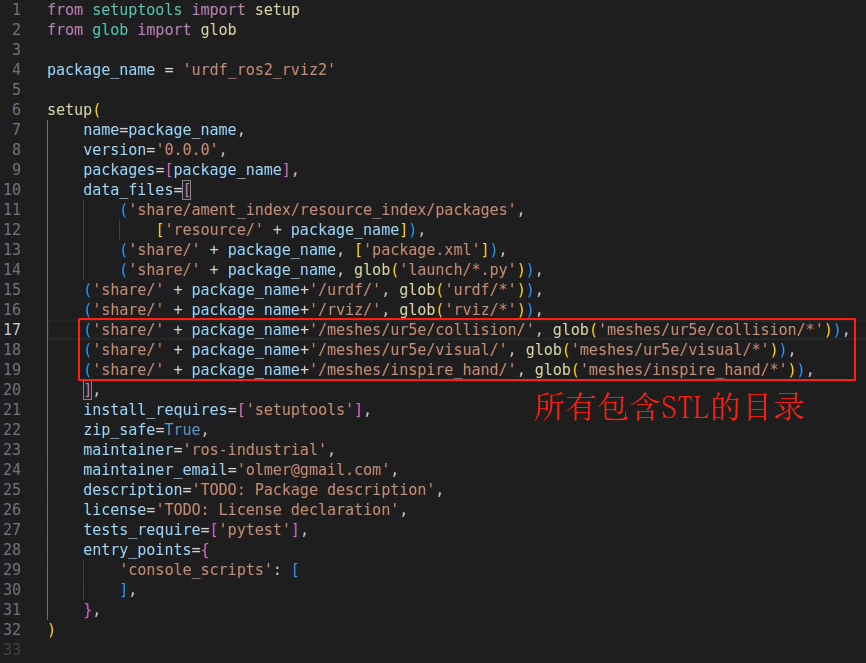
注意如果你 meshes 文件夹结构与我的不同,需要在 setup.py 中修改,使其与你的 STL 文件对应。
(6)修改 urdf 文件
将你的 urdf 文件复制到 your_package_name 的 urdf 目录中。
然后进行修改:主要是修改包名,以及检查 meshes 路径是否正确,例如
1 | <mesh filename="package://urdf_ros2_rviz2/meshes/ur5e/visual/base.dae"/> |
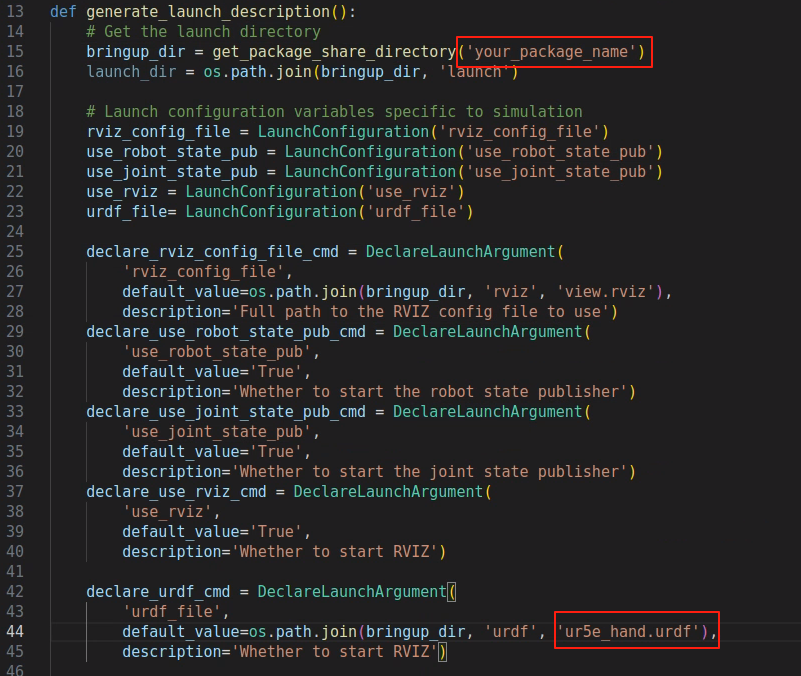
(7)修改 launch 文件
需要修改 package name 以及 urdf 文件名:
(8)修改 rviz
打开 rviz/view.rviz 文件,找到第 85 行,修改:
1 | # 你的模型的基坐标系 |
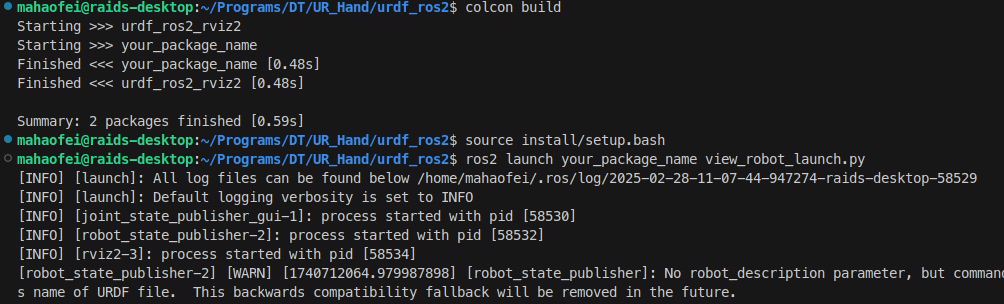
(8)测试
1 | colcon build |
参考:
 微信支付
微信支付 支付宝
支付宝
