【ROS学习笔记】(十二)常用可视化工具
Qt工具箱
1. rqt_console
(1)回到系统内,首先启动海龟例程
1 | roscore |
上面的窗口显示日志的输出信息,info信息、warning警告、error错误等

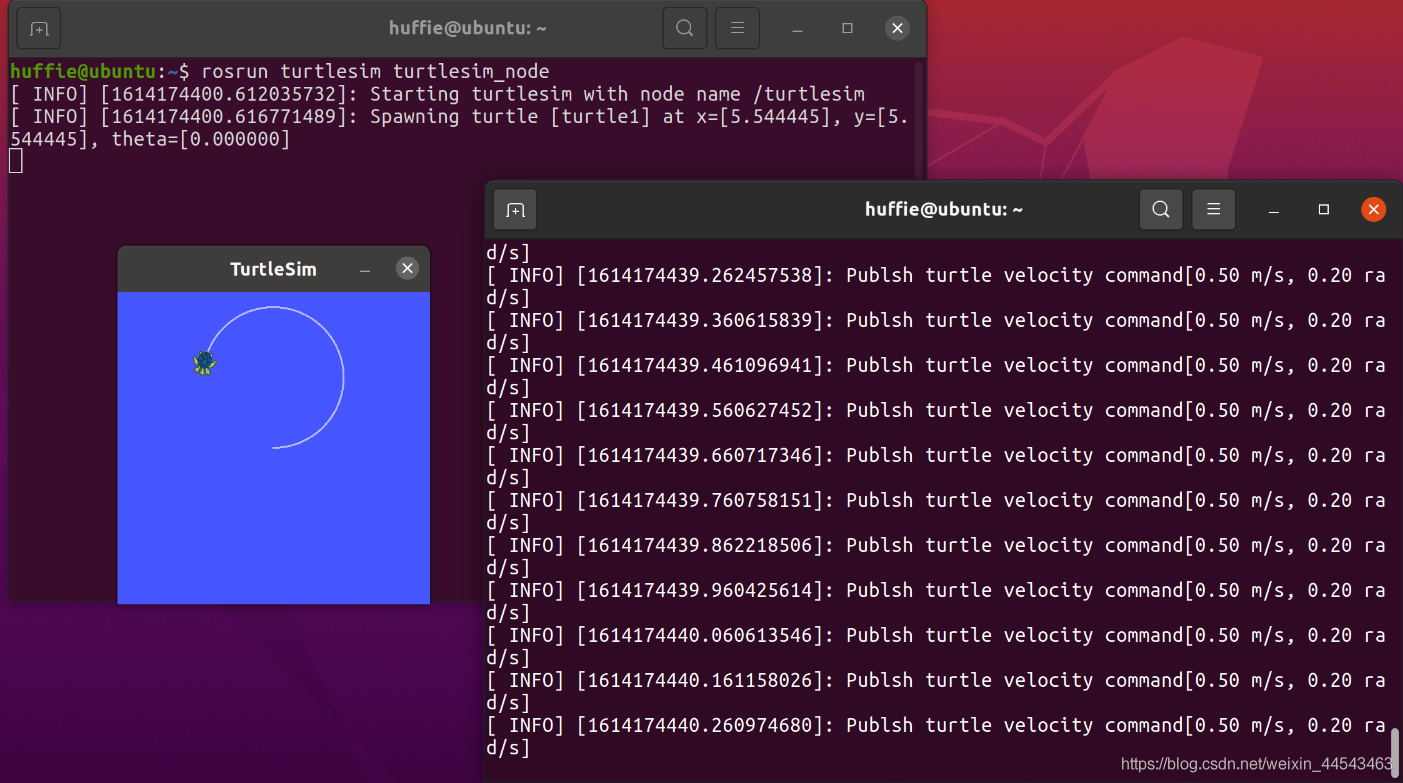
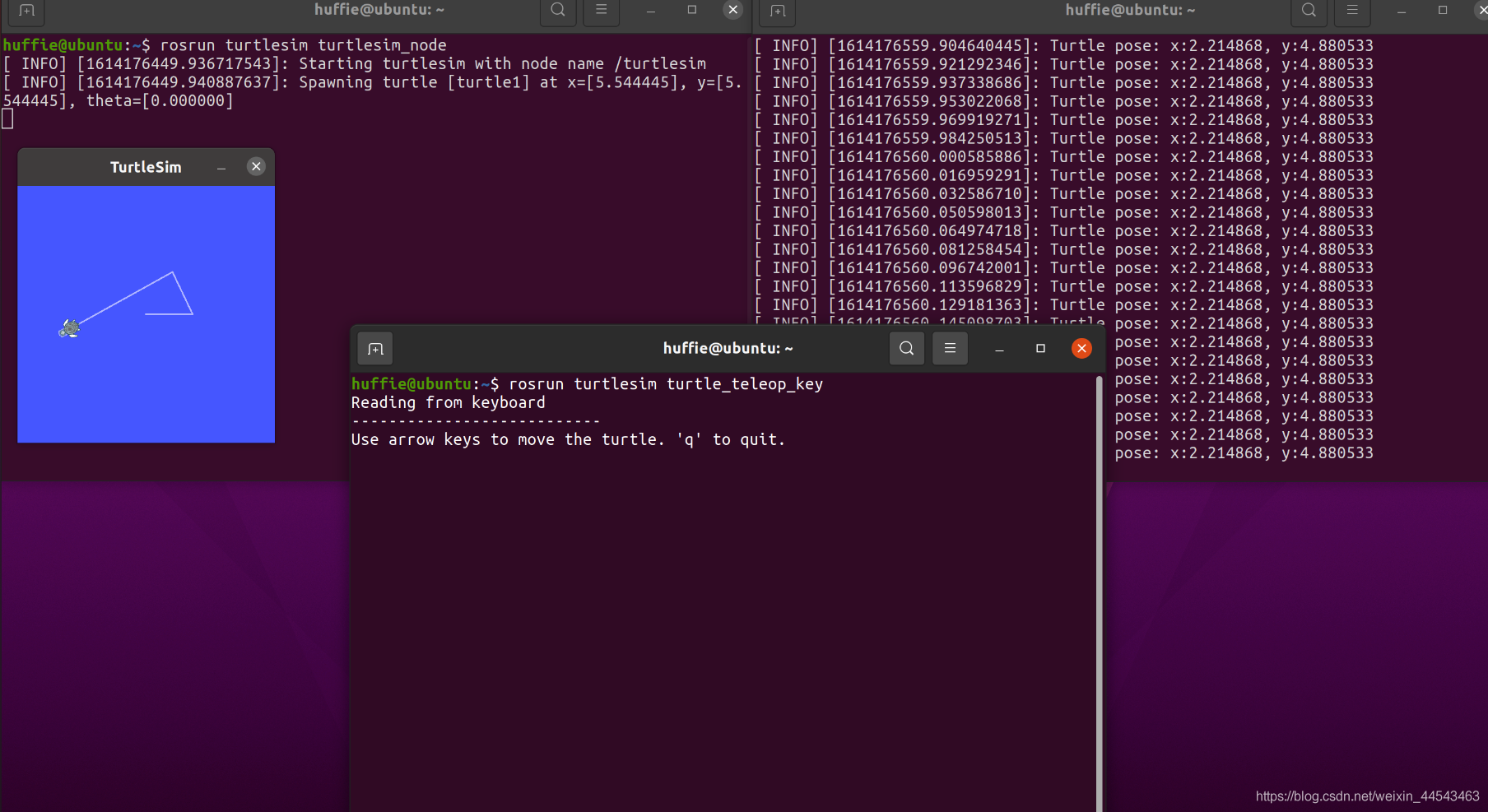
(2)运行键盘控制程序
1 | rosrun turtlesim turtle_teleop_key |
当小海龟碰到边界时,可以看到控制台会输出warning

2. rqt_plot
关闭rot_console控制台,再在终端输入rqt_plot
在Topic栏输入/turtle1/pose
可以看到小海龟的位姿信息都会被输出出来
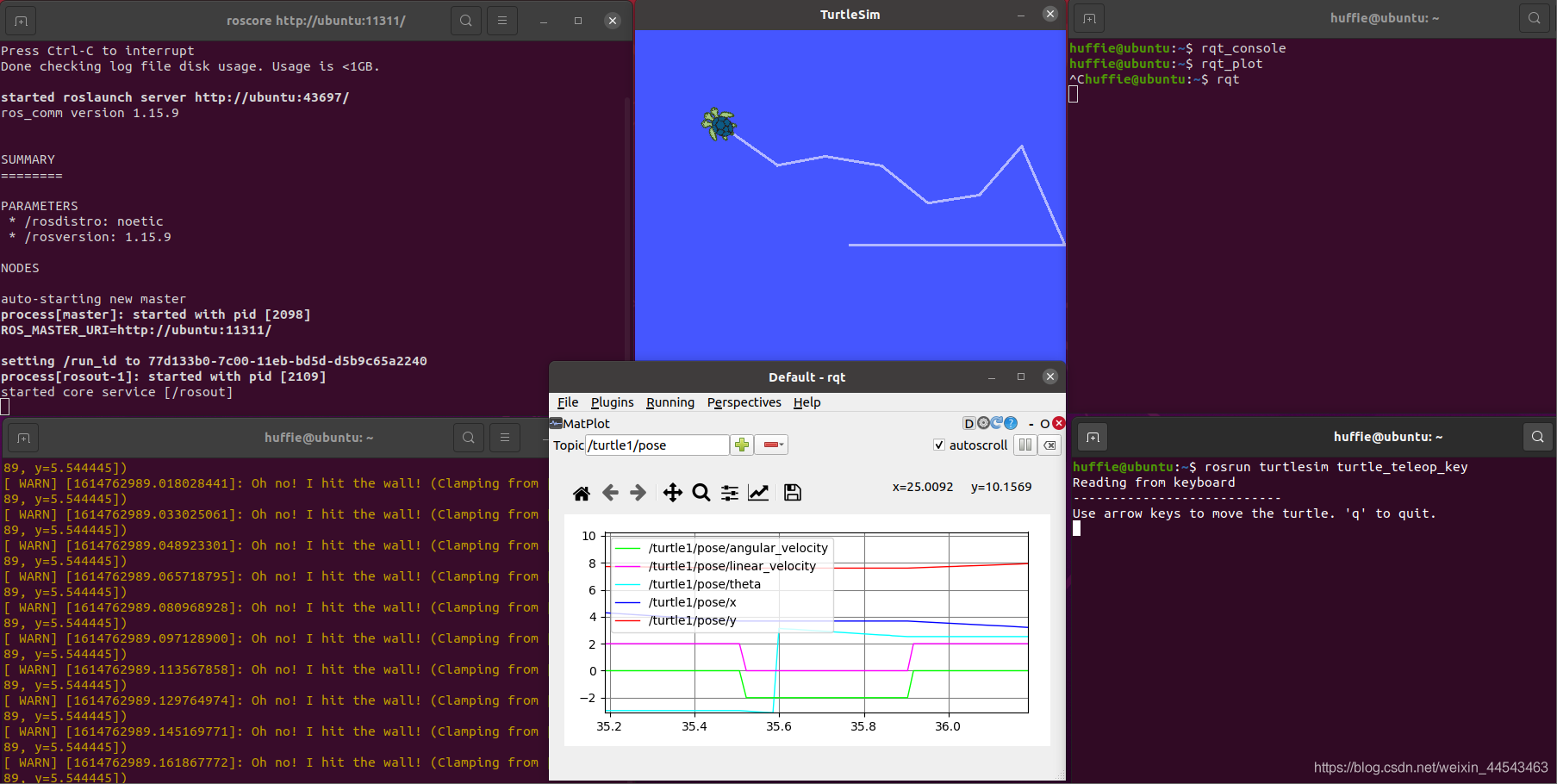
如果打不开的可以在终端输入rqt,进入后选择plugin-visualization-plot打开
如果出现核心已转:运行
sudo apt-get install python-pip和python -m pip install -U matplotlib
3. rqt_image_view
1 | rqt_image_view |
需要驱动摄像头,在这里显示镜头的图像,选择图像的信息后会渲染出来。
4. rqt
1 | rqt |
集成了所有rqt工具,在plugins可以看到所有插件。

Rviz
在命令行输入
1 | roscore |
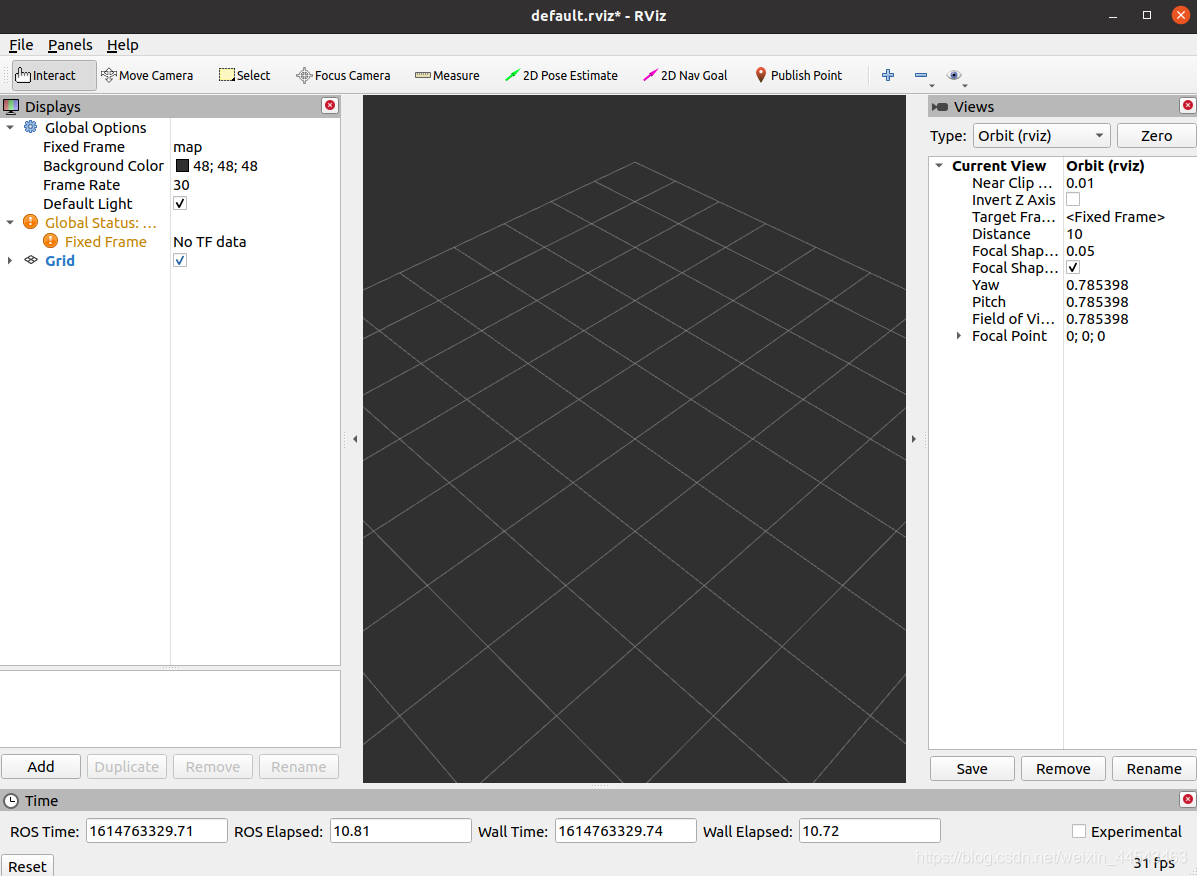
Rviz是一款三维可视化工具,可以很好的兼容基域ROS软件框架的机器人平台。
- 在Rviz中,可以使用扩展标记语言XML对机器人、周围物体等任何实物进行尺寸、质量、位置、材质等属性的描述,并在界面中显示出来。
- Rviz可以通过图形化的方式显示机器人传感器信息、机器人运动状态、环境信息等。
Rviz界面主要包括:3D视图区,视角设置区,工具栏,显示项列表,时间显示区
Rviz是数据显示平台,所以显示数据时,需要选择Topic。
Gazebo
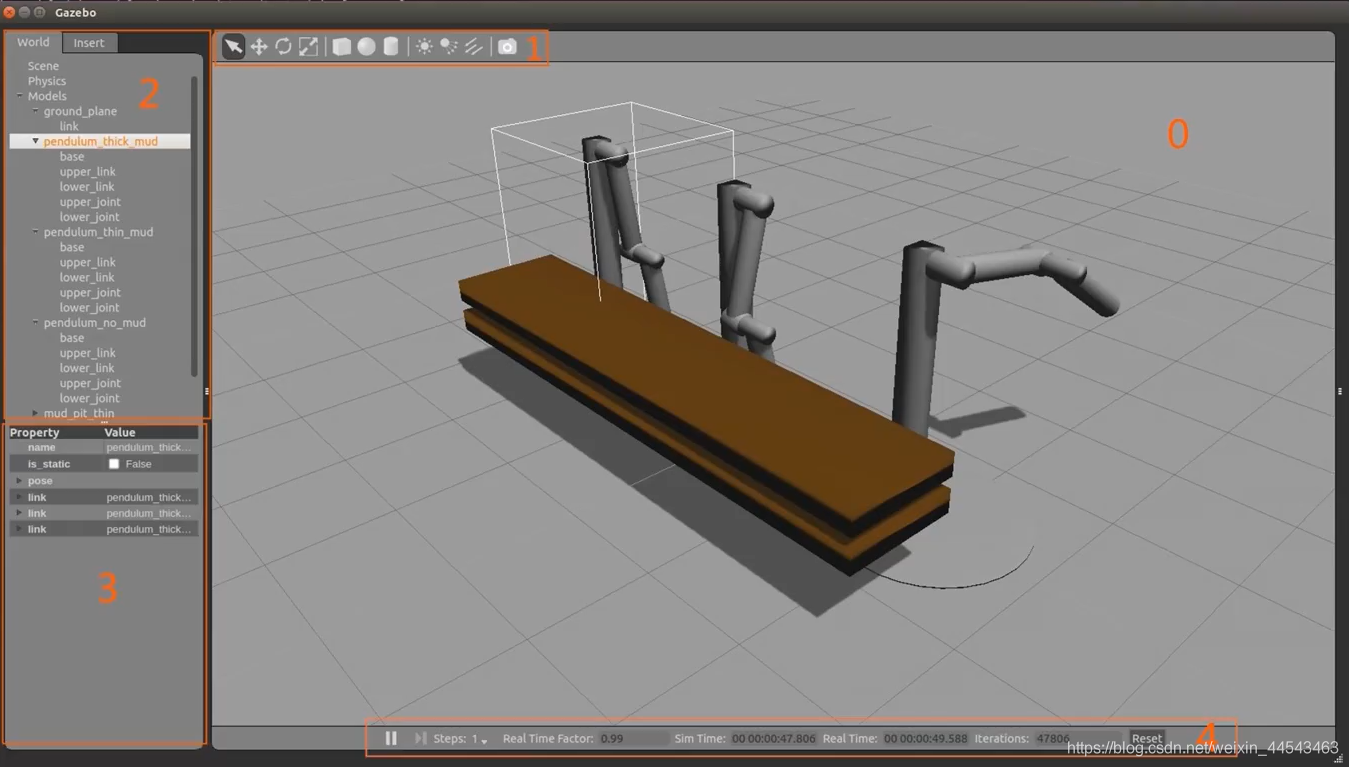
Gazebo是一款功能强大的三位物理仿真平台,用来仿真机器人、传感器、环境的平台。
在Gazebo也包括:0-3D视图区,1-工具栏,2-模型列表,3-模型属性,4-时间显示区
1 | roslaunch gazebo_ros willow |
可能运行不成功,Gazebo对计算机性能要求较高,而且第一次加载会从远程服务器下载一些材质包、环境等。
 微信支付
微信支付 支付宝
支付宝
评论