准备工作
(1)安装 Realsense 环境
参考官方文档:librealsense/distribution_linux.md at master · IntelRealSense/librealsense · GitHub
注册服务器的公钥
1
| sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
|
如果仍然无法检索公钥,请检查并指定代理设置 export http_proxy="http://<proxy>:<port>"
将服务器添加到存储库列表中
1
| sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
|
安装库
1
2
3
4
| sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
|
验证安装,使用 realsense-viewer 测试驱动是否安装完成。
1
2
3
4
| mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone -b ros1-legacy https://github.com/IntelRealSense/realsense-ros.git
cd ~/catkin_ws && catkin_make
|
一定要注意 clone 的分支,默认是 ros2,如果是 ros1 环境需要指定分支。
(2)安装 aruco_ros
首先创建一个工作空间,进入到工作空间的 src 目录下,下载 aruco_ros 包,注意根据自己的 ros 版本选择仓库分支,我这里选择的是 noetic-devel
1
2
3
4
5
| cd 【工作空间】/src
git clone -b noetic-devel https://github.com/pal-robotics/aruco_ros.git
cd ..
catkin_make
source devel/setup.bash
|
设置参数
主要修改 single.launch 文件。
- 修改要识别的 aruco 标记的 ID 和 size。
- 修改其中的
<remap from="/camera_info 和 <remap from="/image" 以及 <param name="camera_frame"。
修改完成后如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
| <launch>
<arg name="markerId" default="66"/>
<arg name="markerSize" default="0.07"/> <!-- in m -->
<arg name="eye" default="left"/>
<arg name="marker_frame" default="aruco_marker_frame"/>
<arg name="ref_frame" default=""/> <!-- leave empty and the pose will be published wrt param parent_name -->
<arg name="corner_refinement" default="LINES" /> <!-- NONE, HARRIS, LINES, SUBPIX -->
<node pkg="aruco_ros" type="single" name="aruco_single">
<remap from="/camera_info" to="/camera/color/camera_info" />
<remap from="/image" to="/camera/color/image_raw" />
<param name="image_is_rectified" value="True"/>
<param name="marker_size" value="$(arg markerSize)"/>
<param name="marker_id" value="$(arg markerId)"/>
<param name="reference_frame" value="$(arg ref_frame)"/> <!-- frame in which the marker pose will be refered -->
<param name="camera_frame" value="/camera_link"/>
<param name="marker_frame" value="$(arg marker_frame)" />
<param name="corner_refinement" value="$(arg corner_refinement)" />
</node>
</launch>
|
测试
(1)启动相机
1
| roslaunch realsense2_camera rs_aligned_depth.launch
|
(2)启动 aruco_ros
1
2
| roslaunch aruco_ros single.launch
roslaunch aruco_ros single.launch markerId:=582 markerSize:=0.057
|
(3)可视化
1
| rosrun image_view image_view image:=/aruco_single/result
|
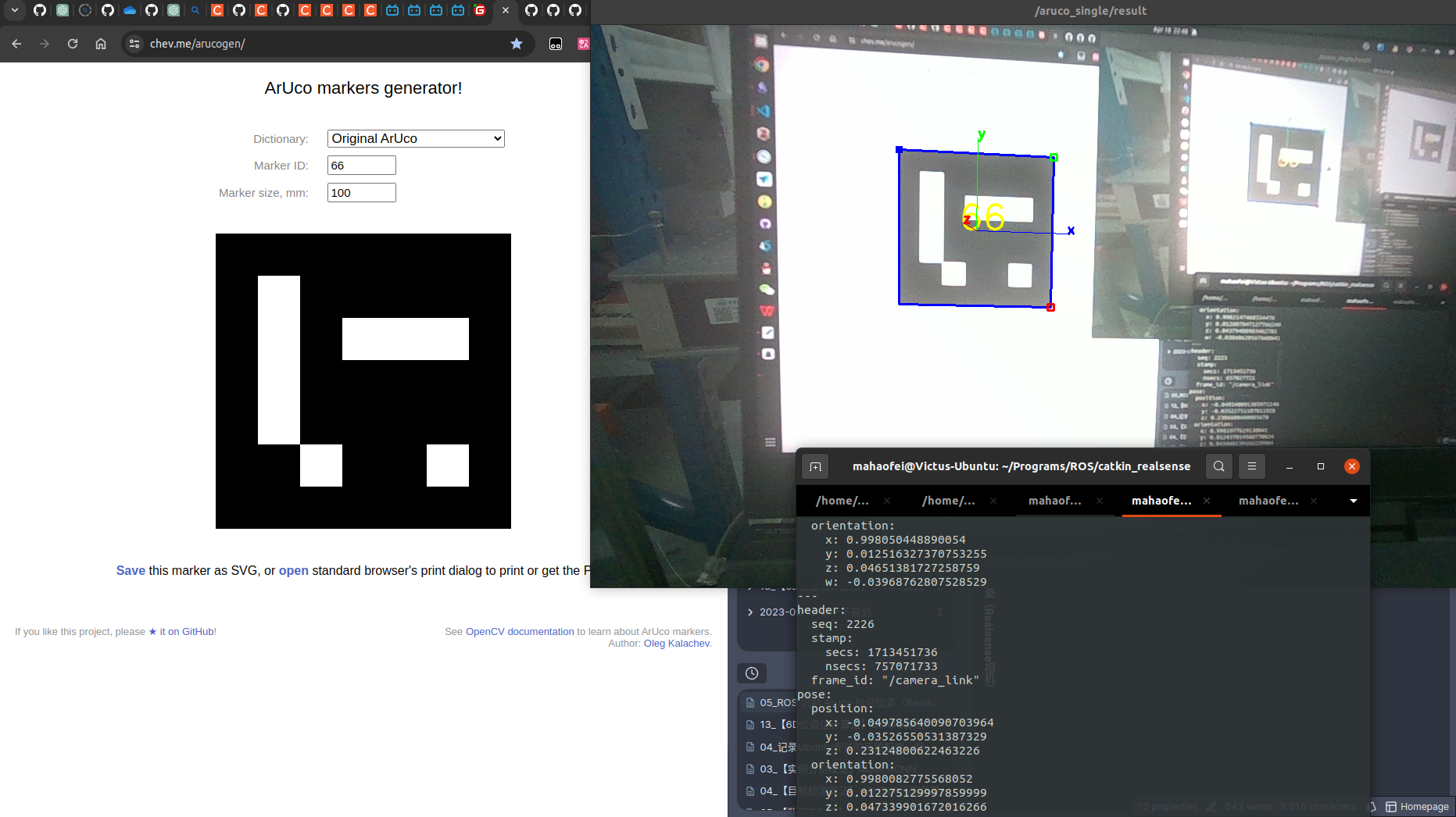
(4)查看位姿
1
| rostopic echo /aruco_single/pose
|
 微信支付
微信支付 支付宝
支付宝