【RobotStudio学习笔记】(六)有效载荷
从夹爪夹住工件后,系统的载荷就发生了变化,对于仿真程序中效果区别可能不明显,但在实际系统中,必须要考虑载荷的区别。
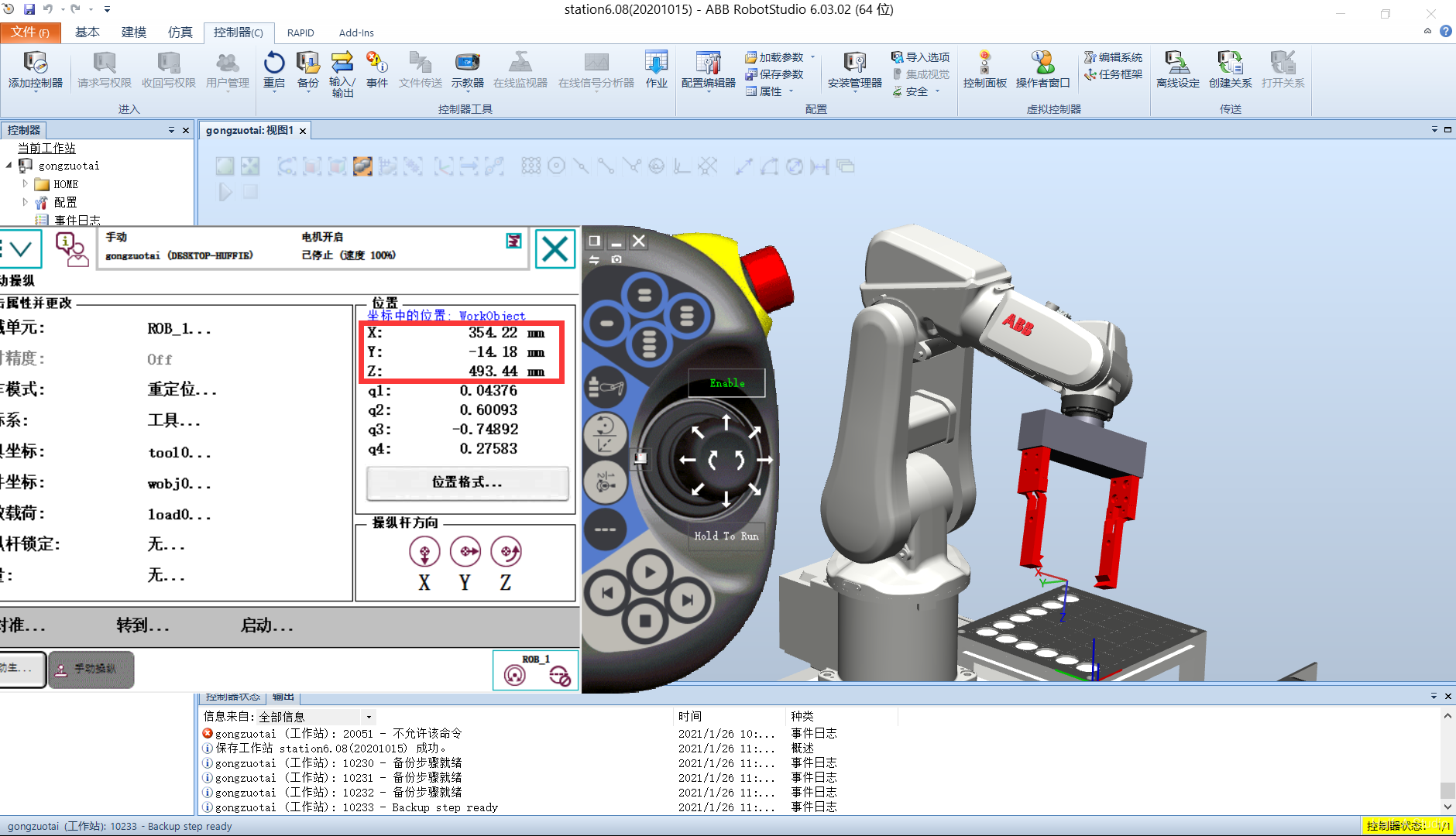
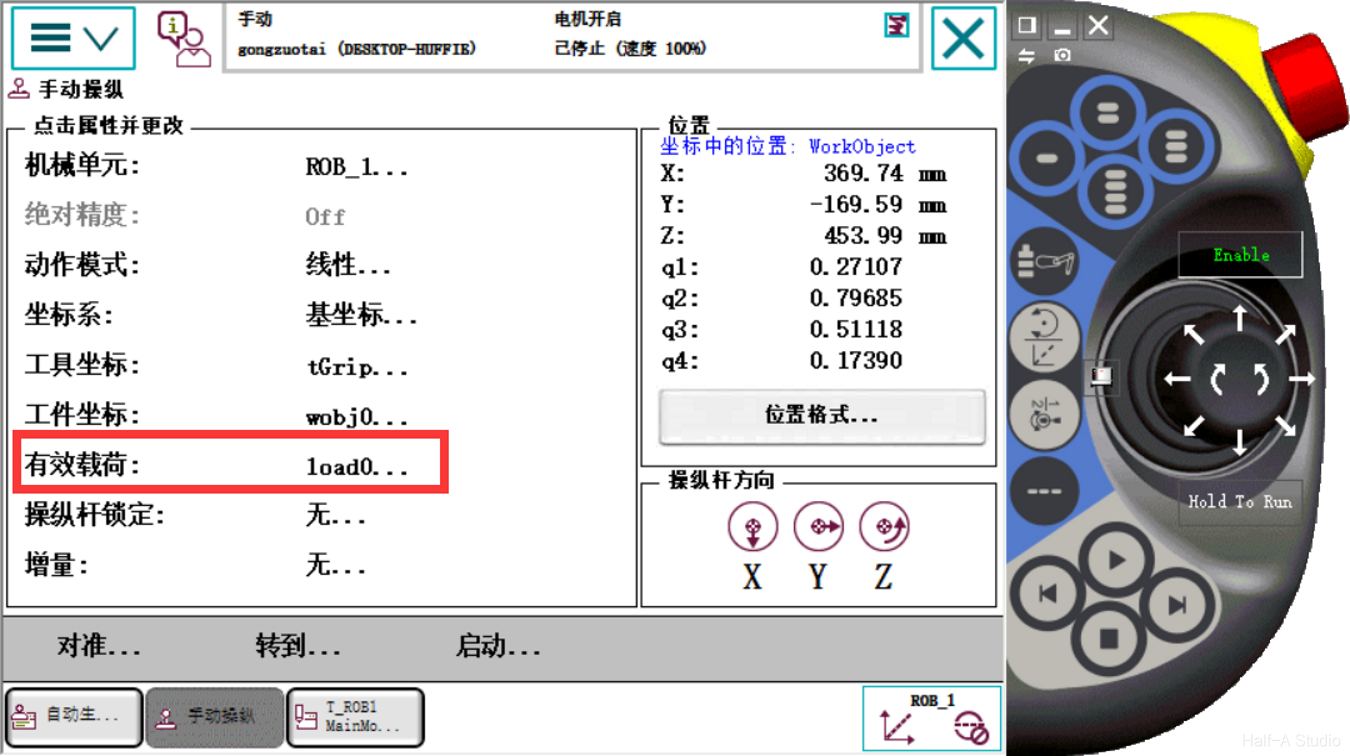
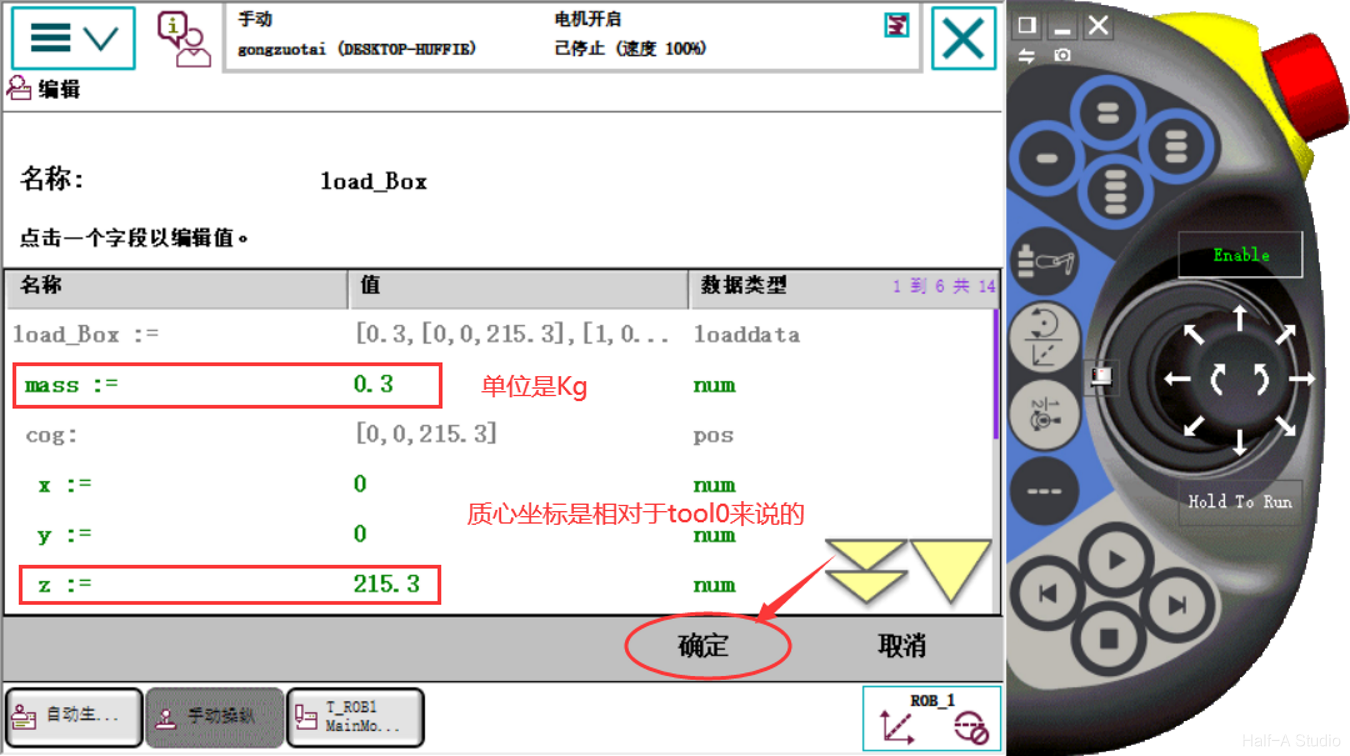
- 打开手动操作-有效载荷
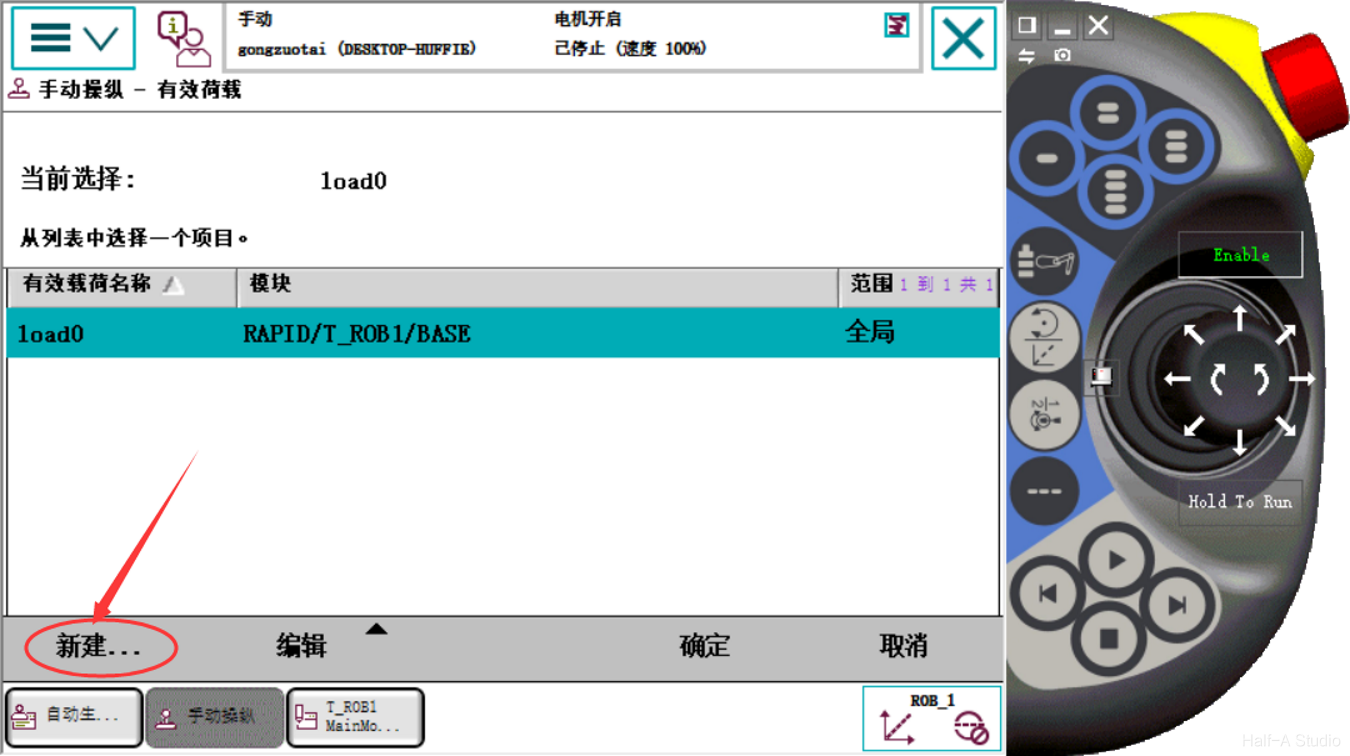
- 新建一个有效载荷
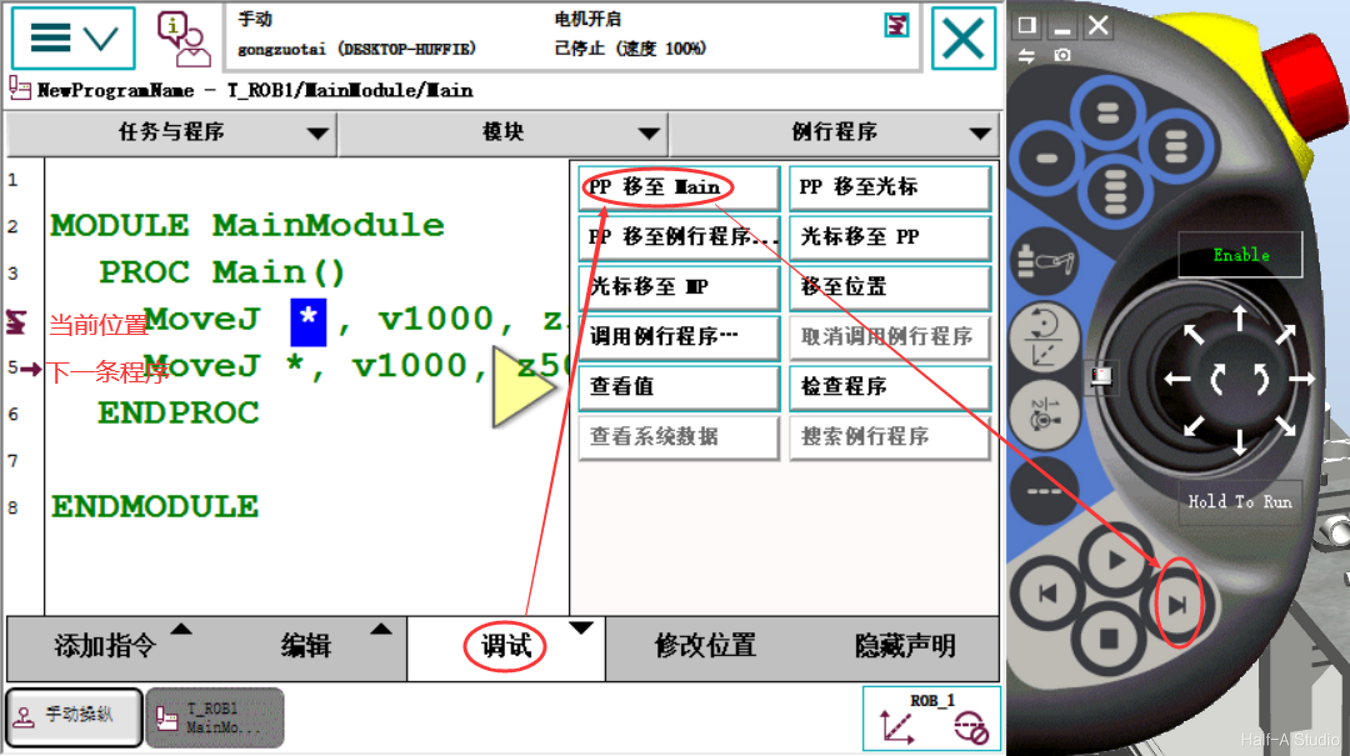
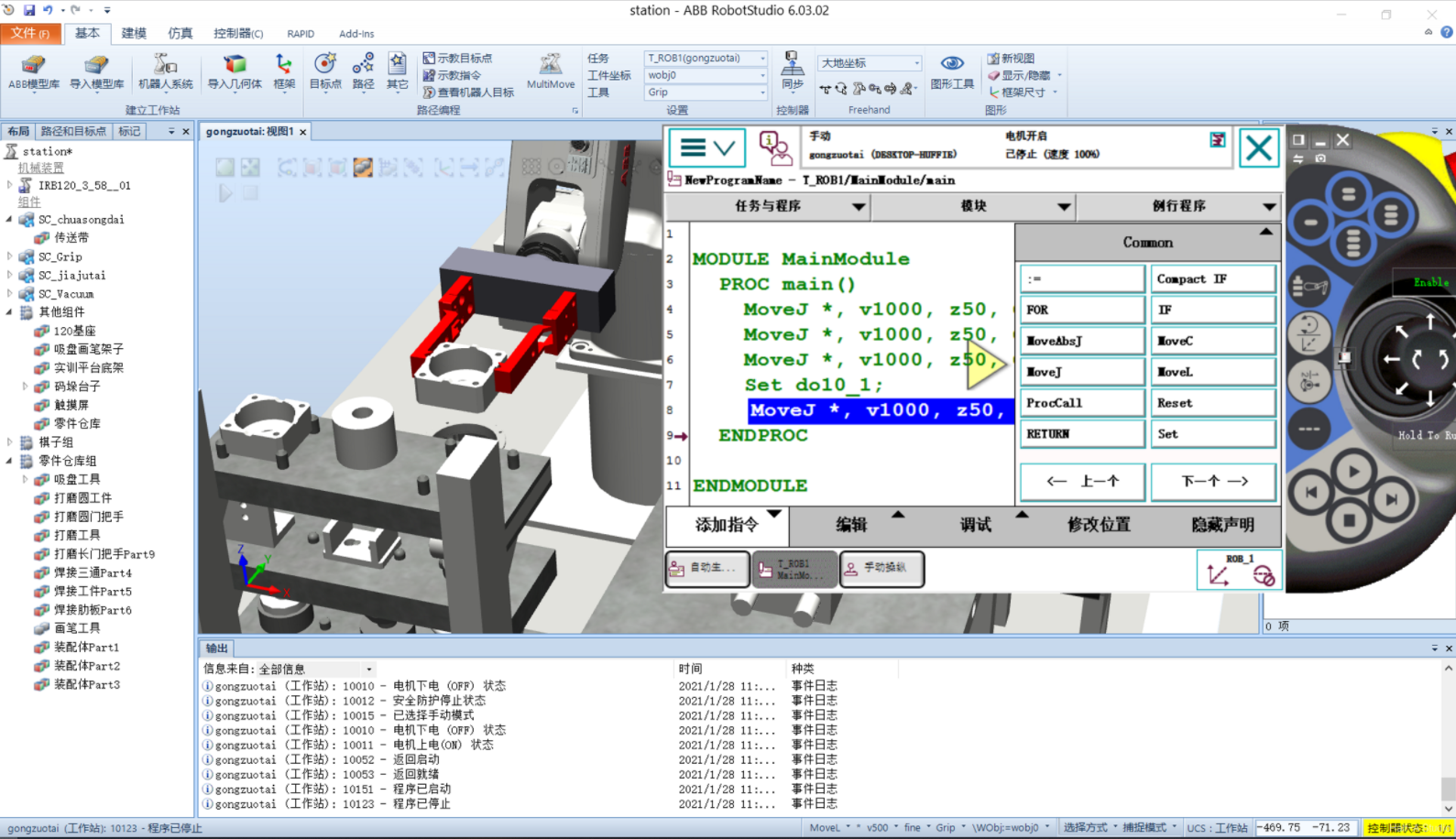
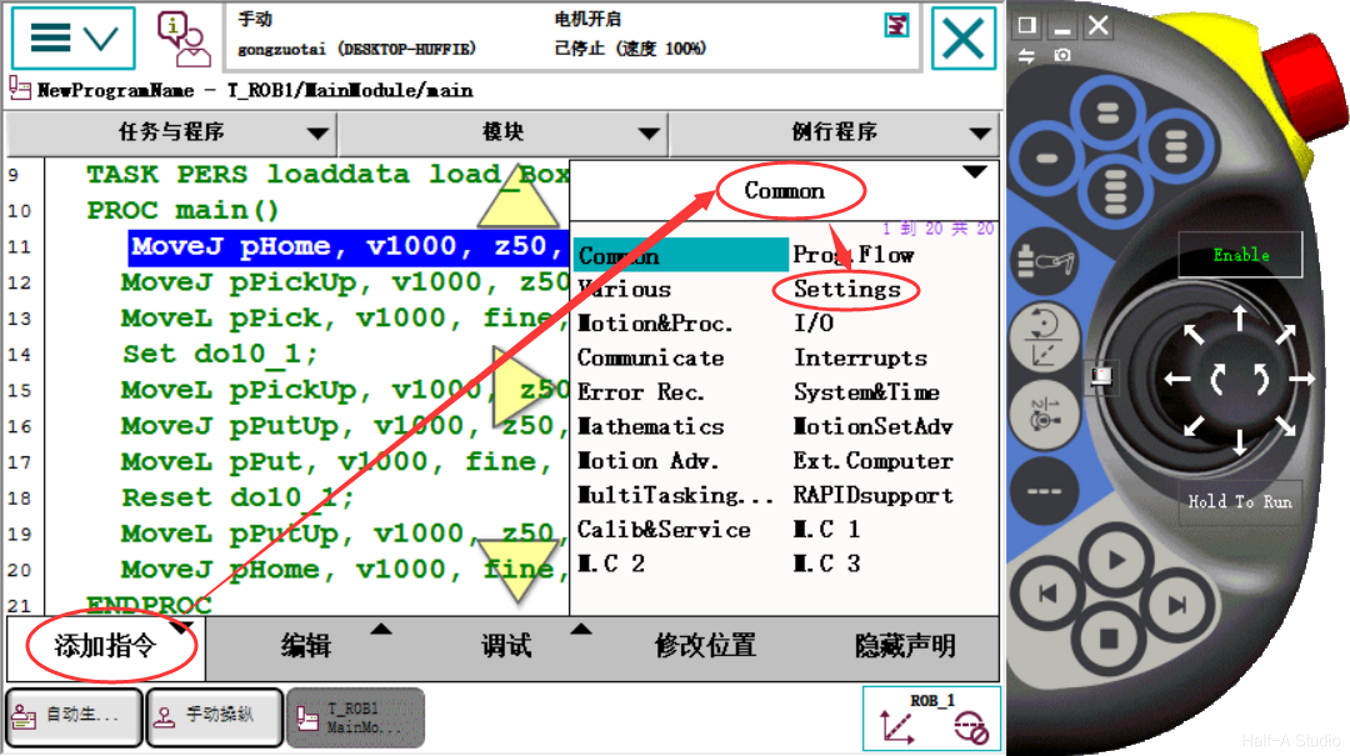
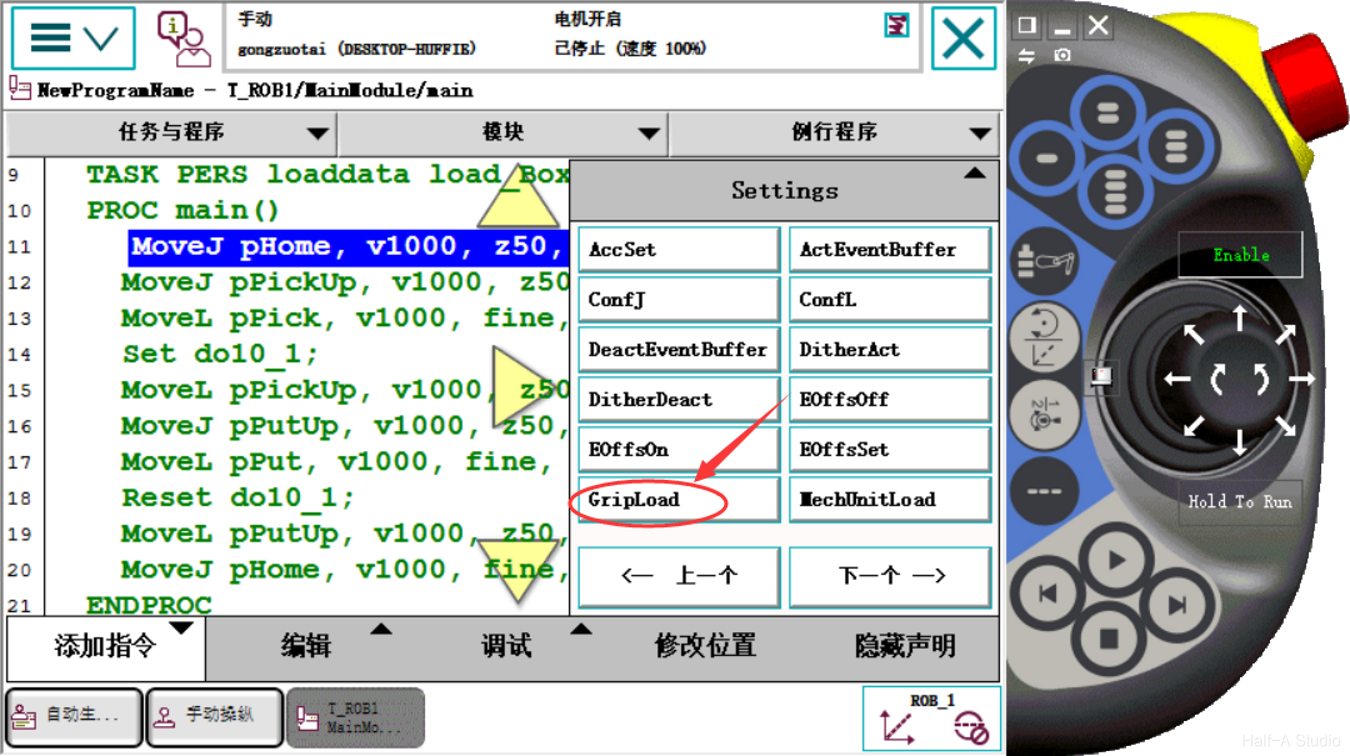
- 修改程序,在程序开始处,添加指令-settings-gripload
- 添加到上方,负载为load0
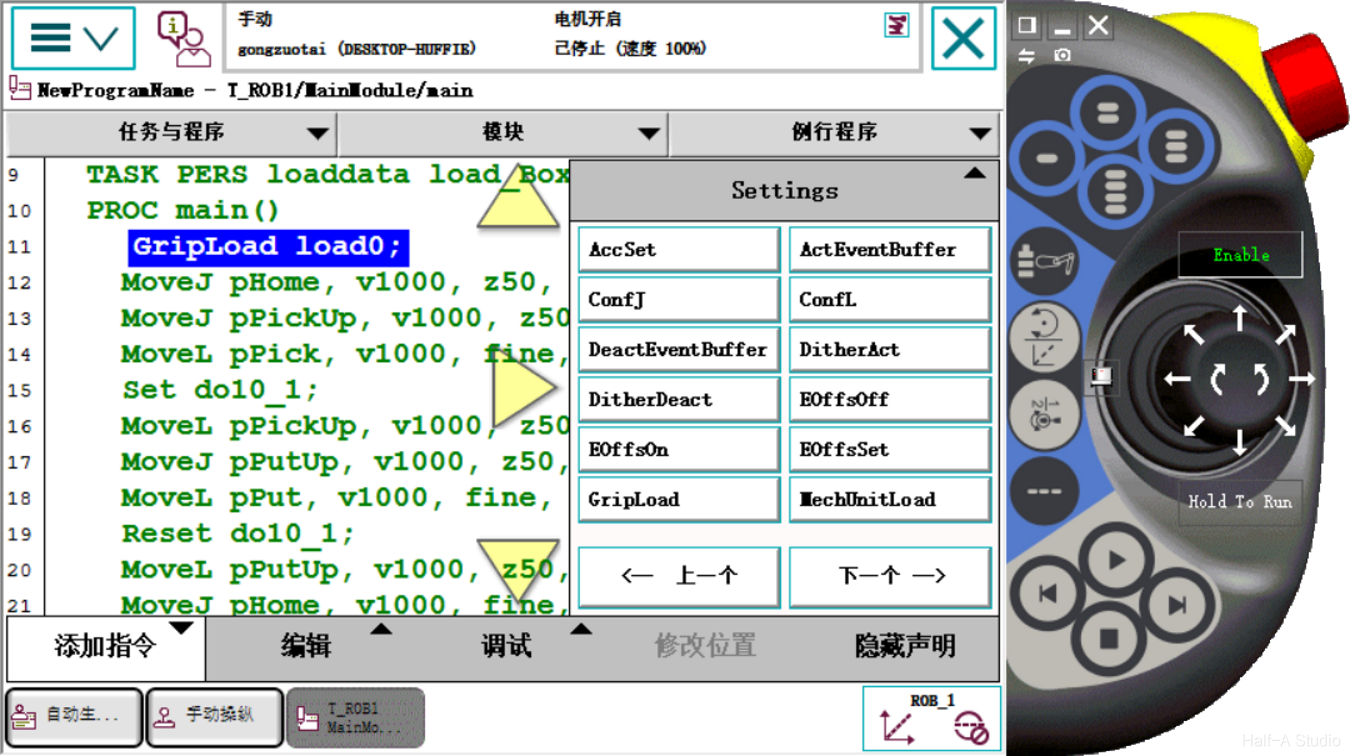
- 在夹爪夹取工件后,即set dol0_1语句下,再次添加一条gripload语句,负载为load_Box。同理,在夹爪松开后,再次添加一条gripload语句,负载为load0.

 微信支付
微信支付 支付宝
支付宝
评论