【RobotStudio学习笔记】(八)速度设置
一、速度的直接设置
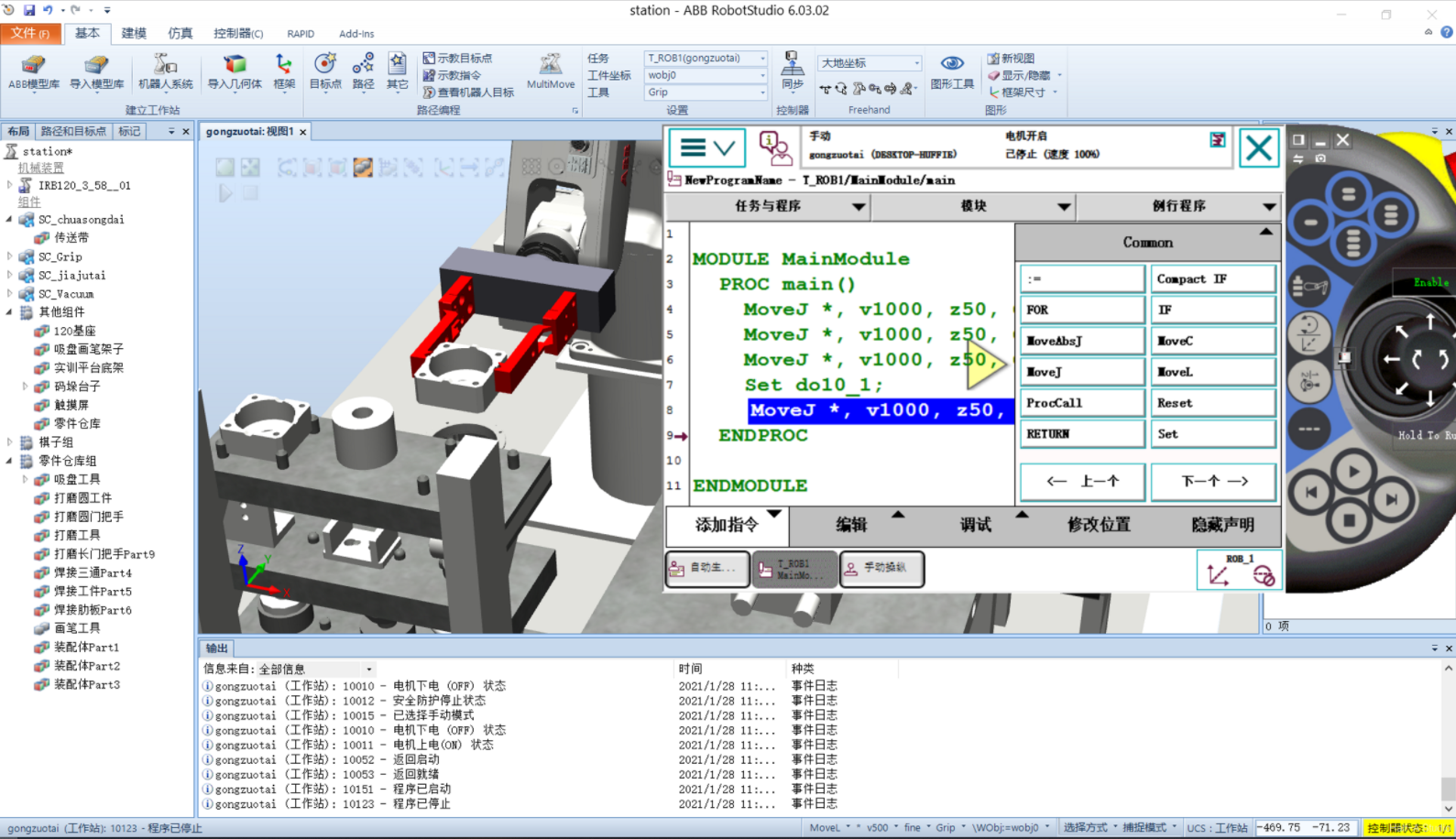
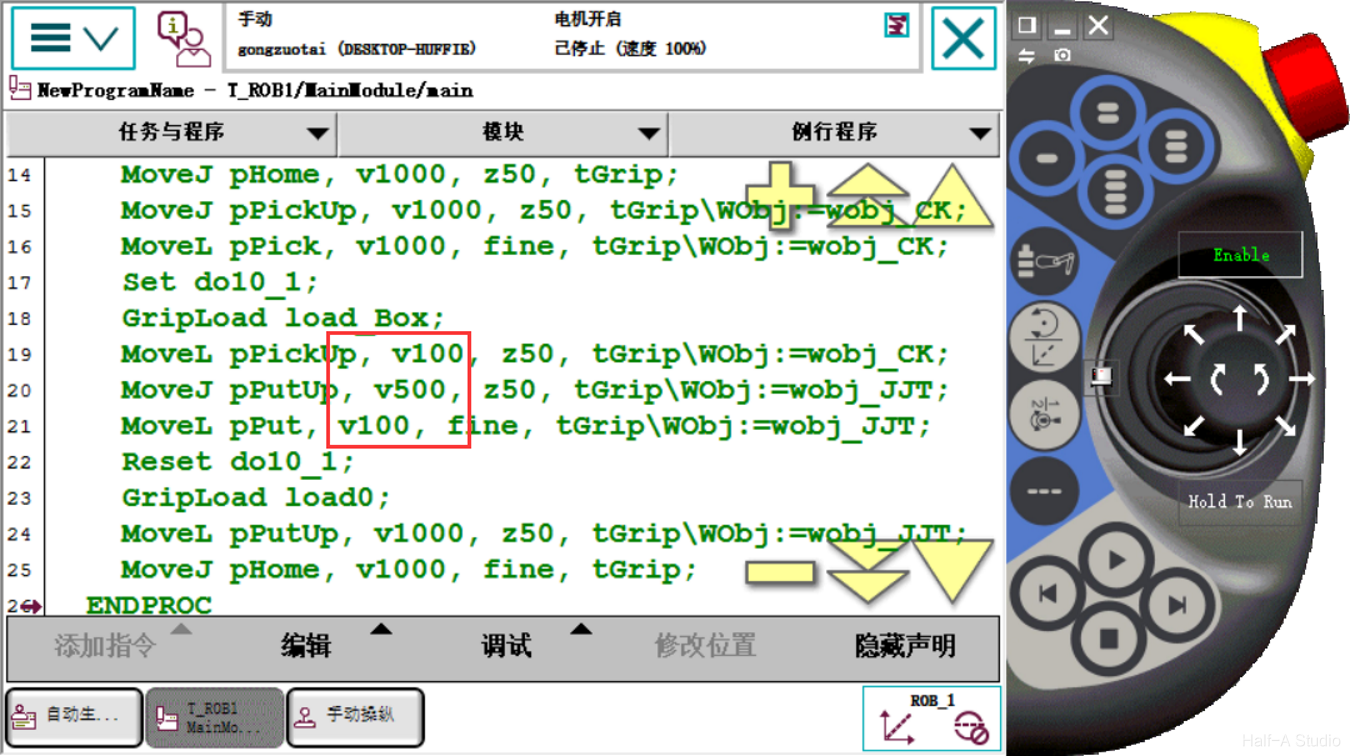
在手动模式下,最大速度受到限制,最大时250mm/s。而程序中v1000在仿真和实际中是十分快的,因此修改工件拿起和放下时的速度,轻拿轻放。
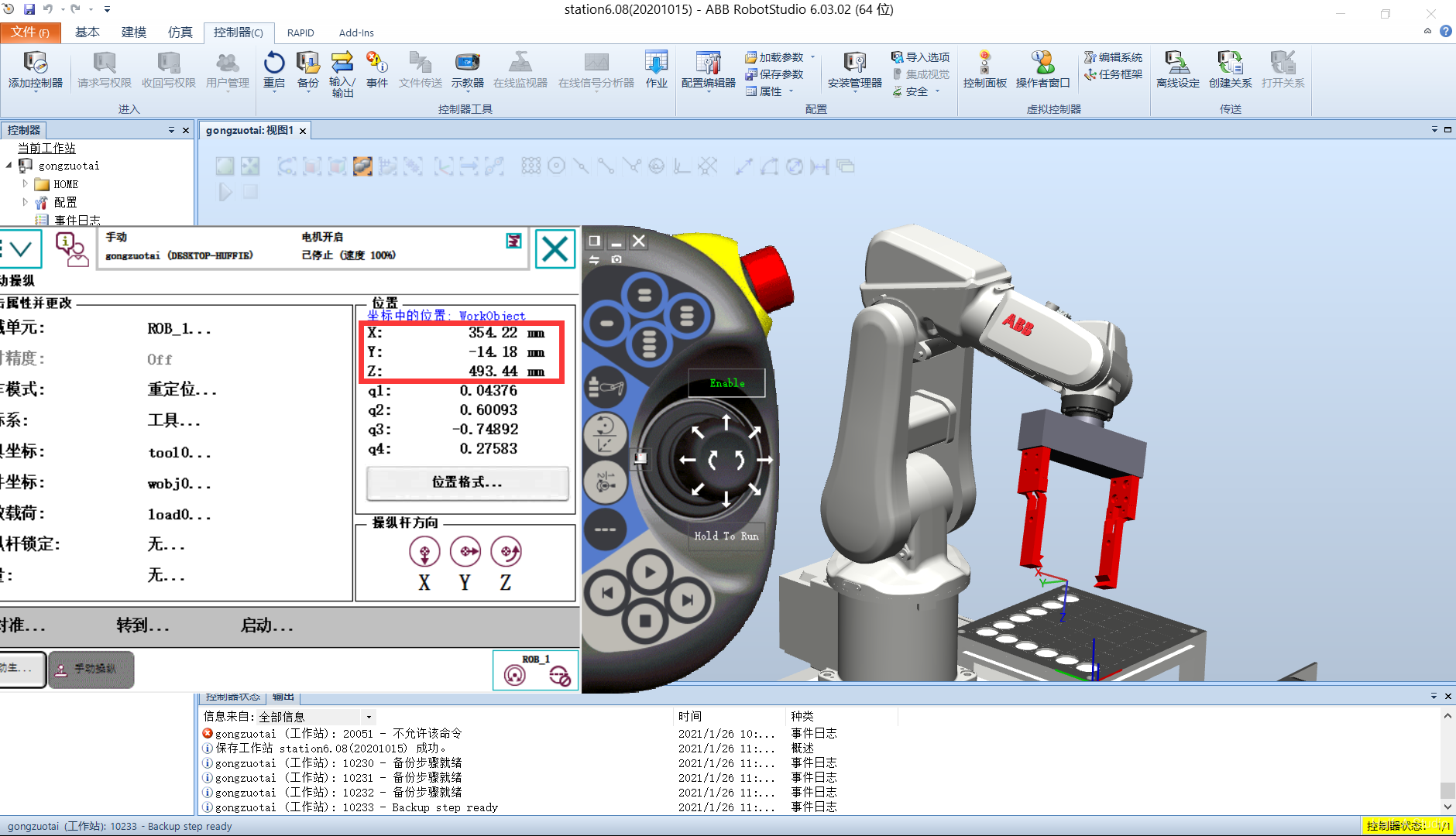
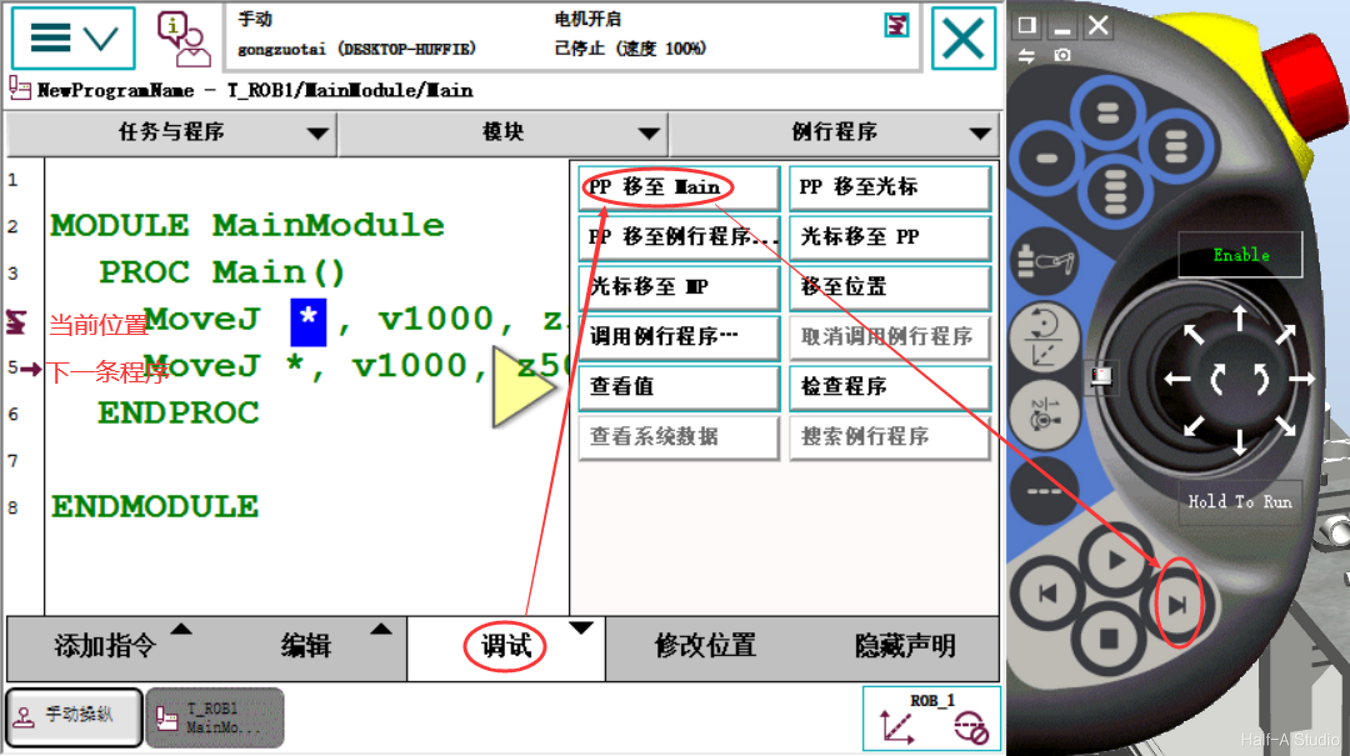
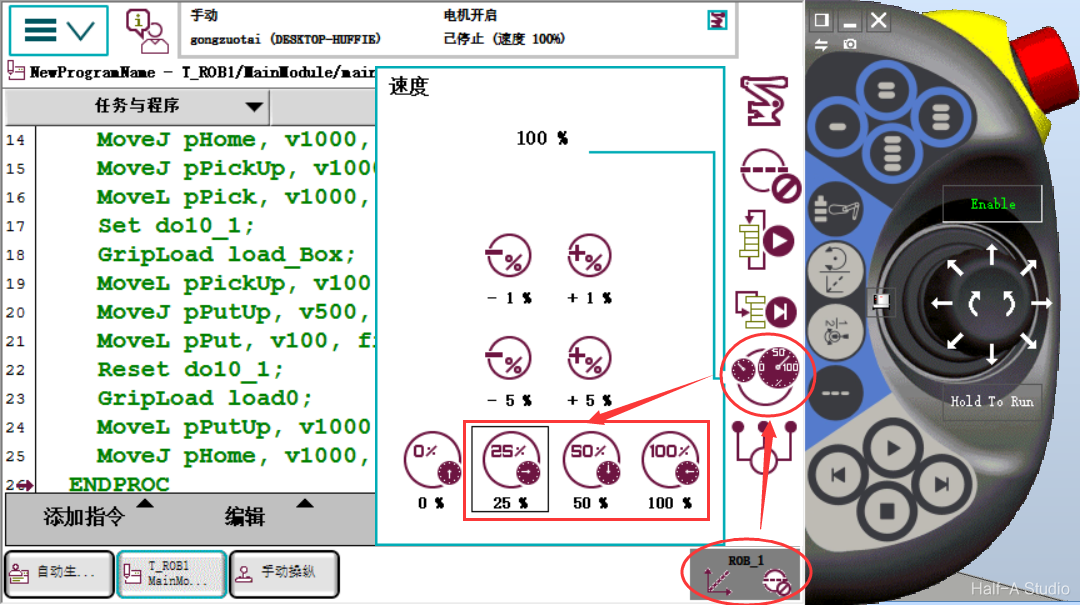
实际操作时,手动调试完成后要先如下图,从25%速度开始测试,如果实物机器人运动没有问题,在逐步增大速度,直到100%。如果中间出现任何问题,就将程序中的速度参数修改成适合的值。
二、速度数据的创建与替换
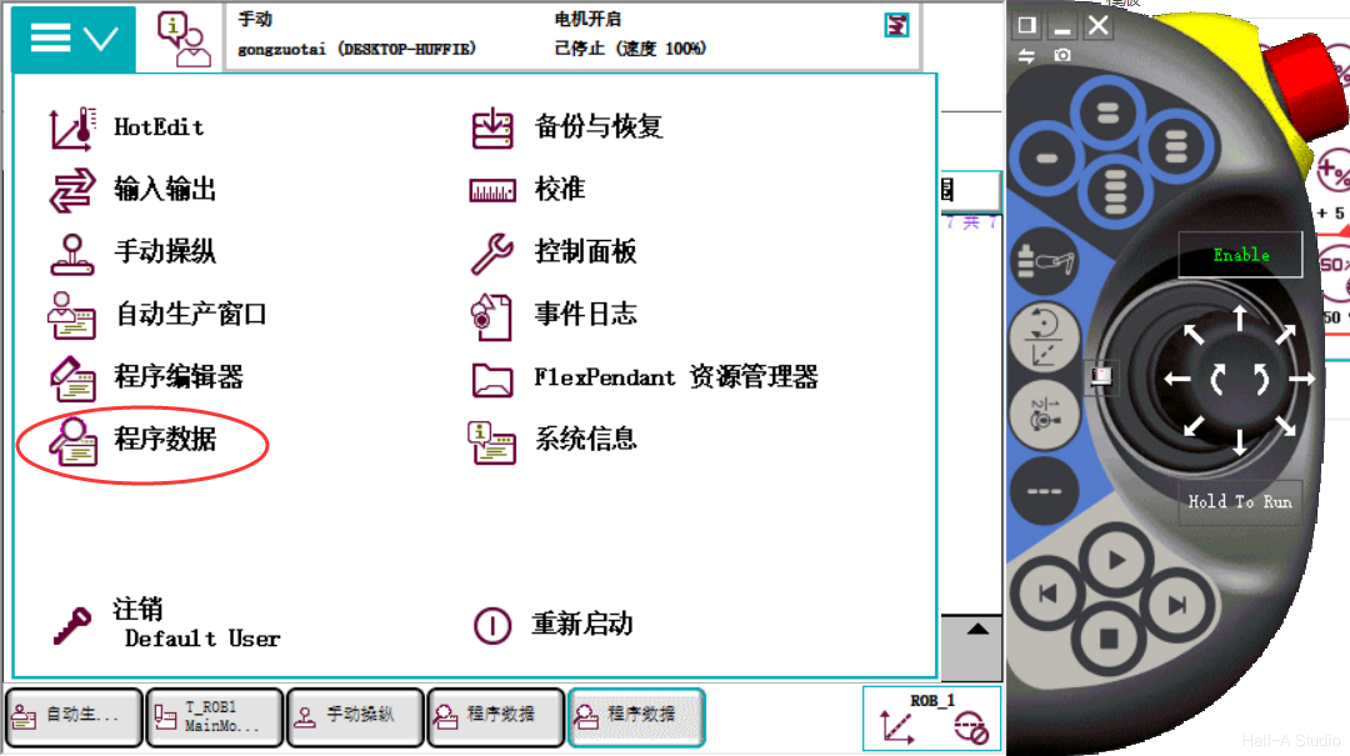
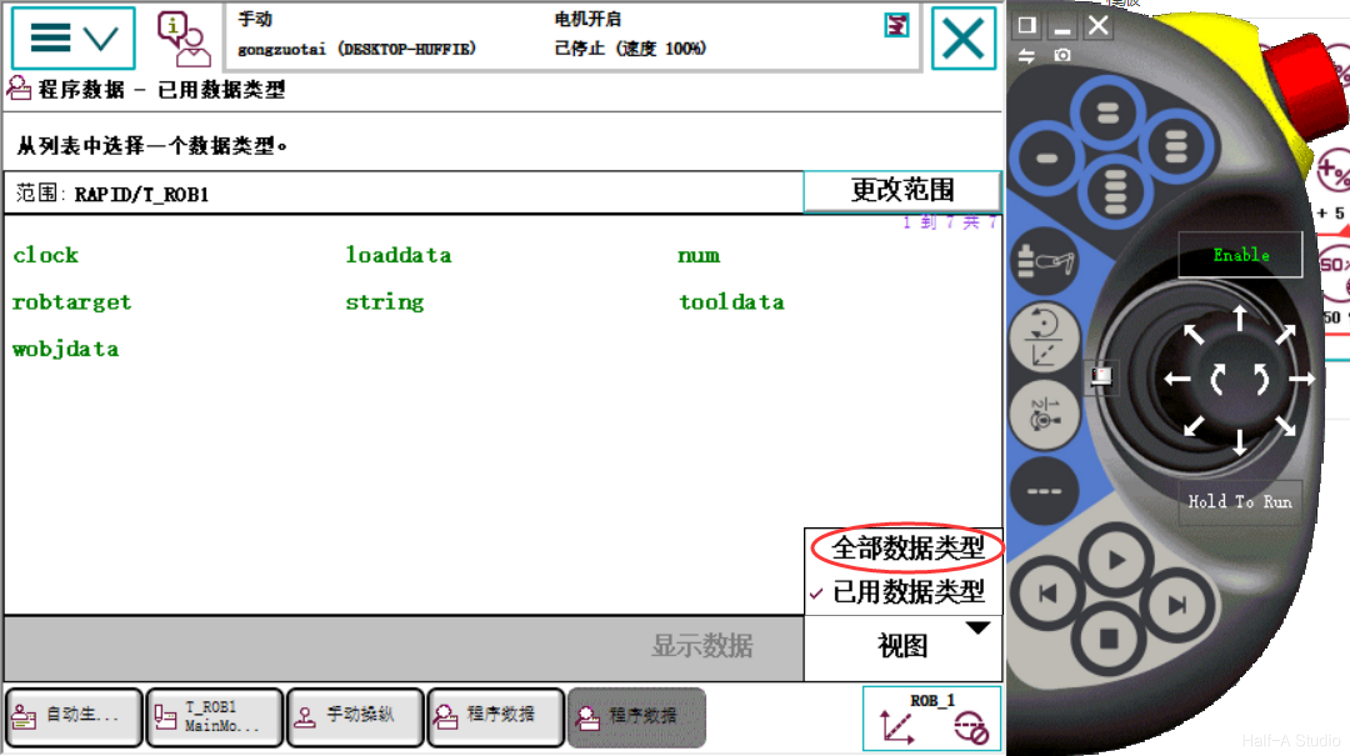
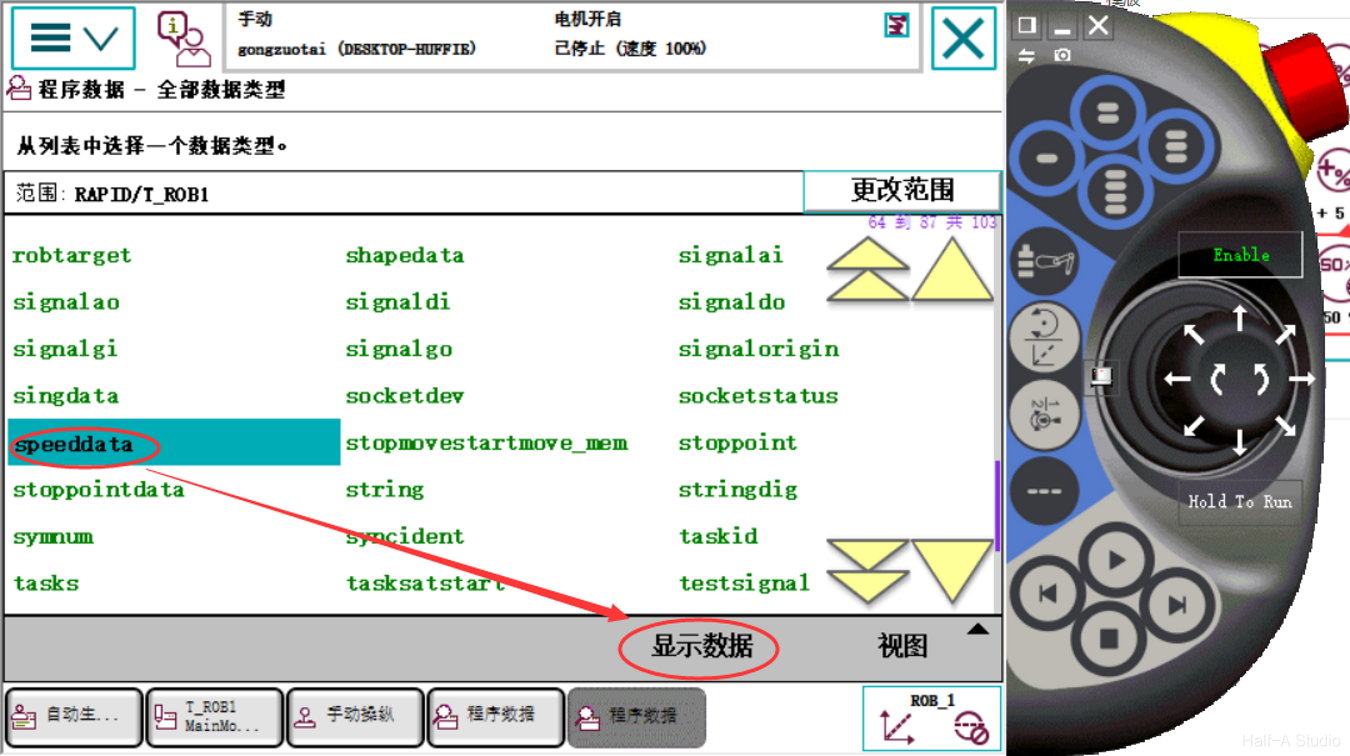
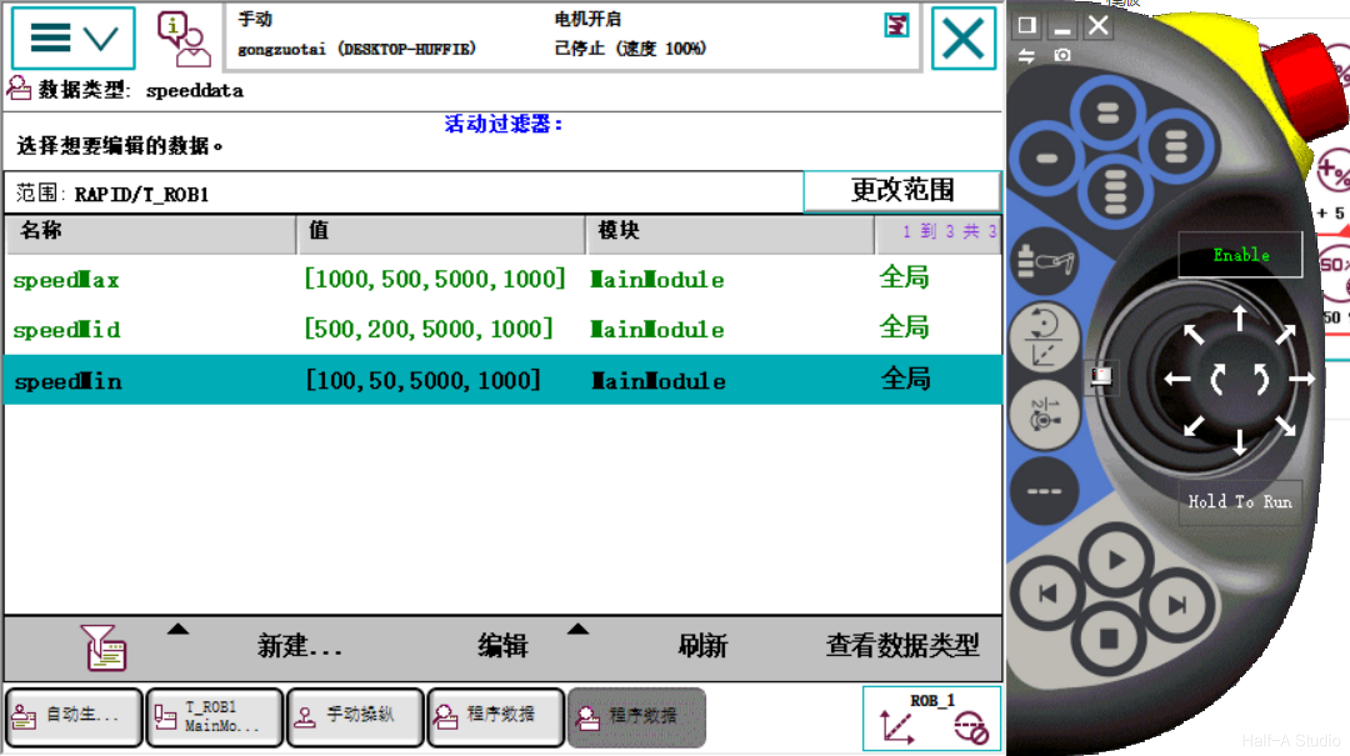
- 点击菜单【三V】—>数据类型—>全部数据类型—speeddata—>显示数据—>新建
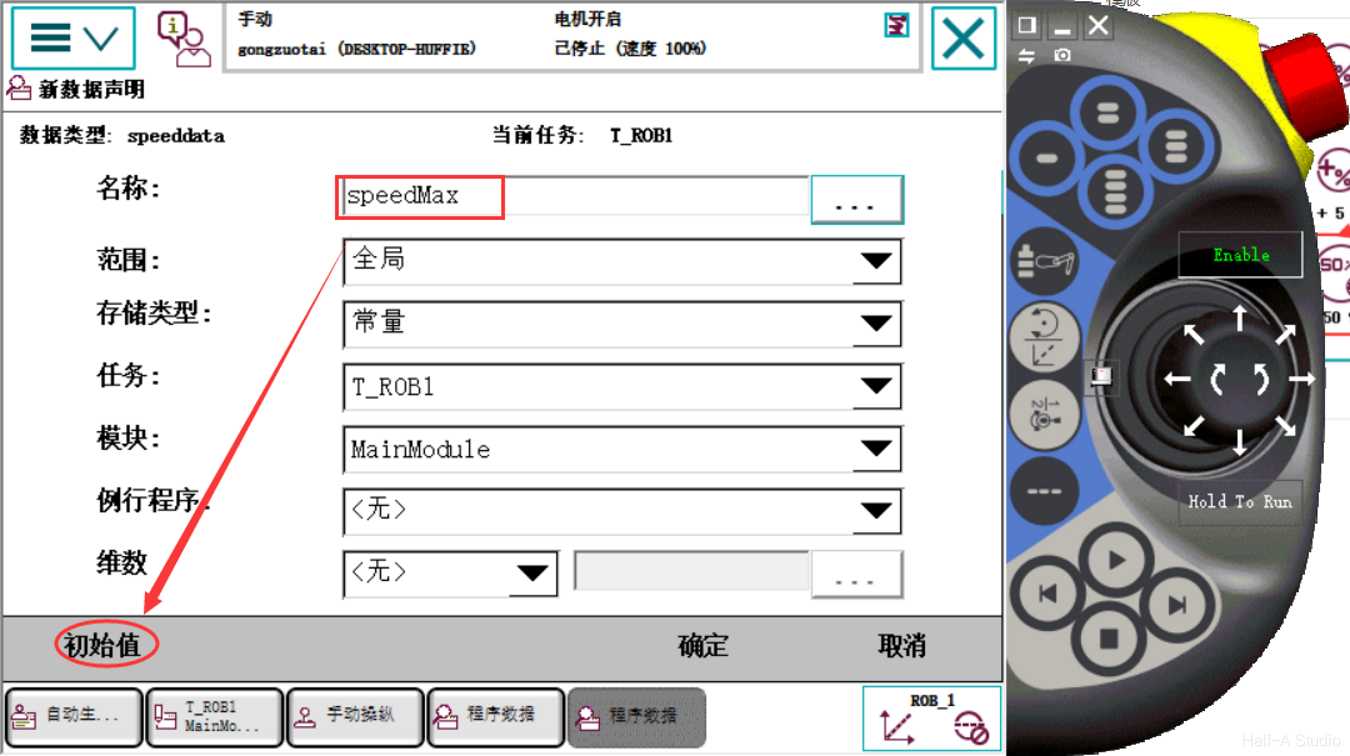
- 设置变量的名字,然后修改初始值,其中v_tcp是直线运动速度(主要用这个),v_ori是重定位速度。

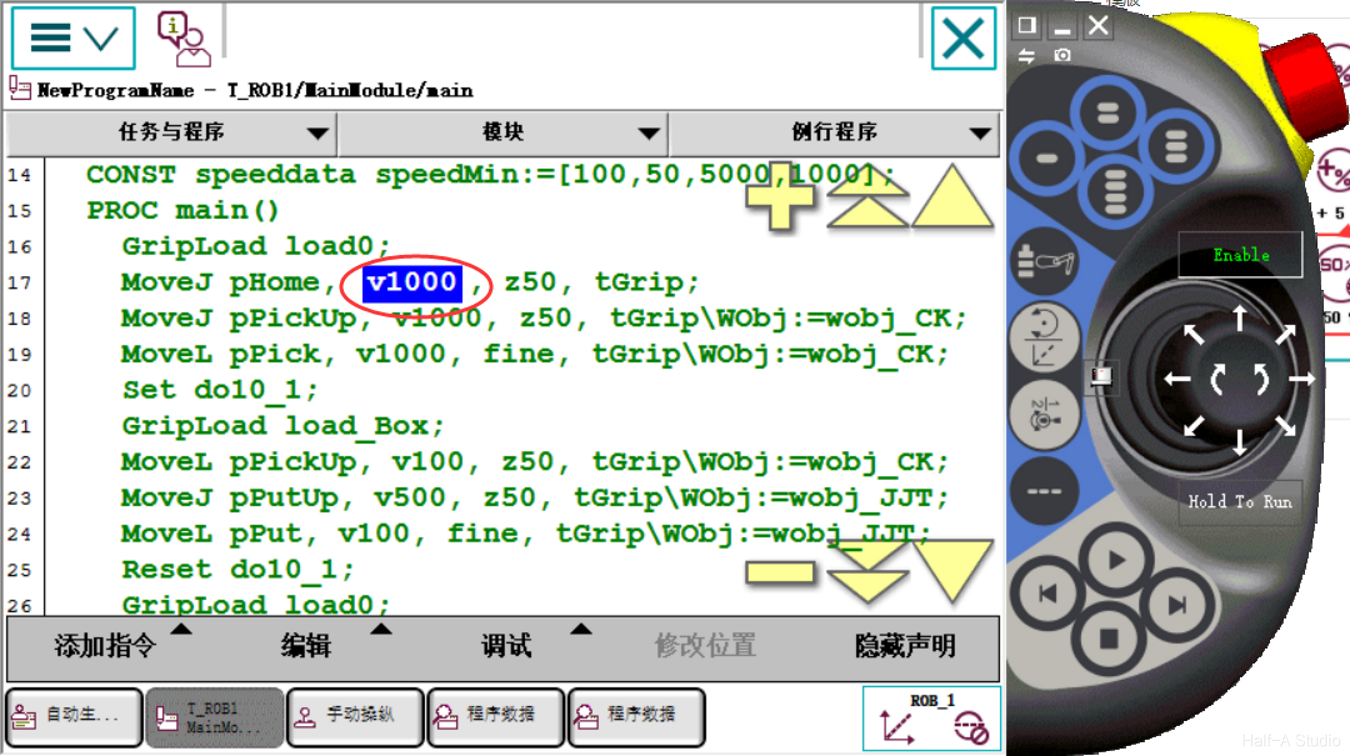
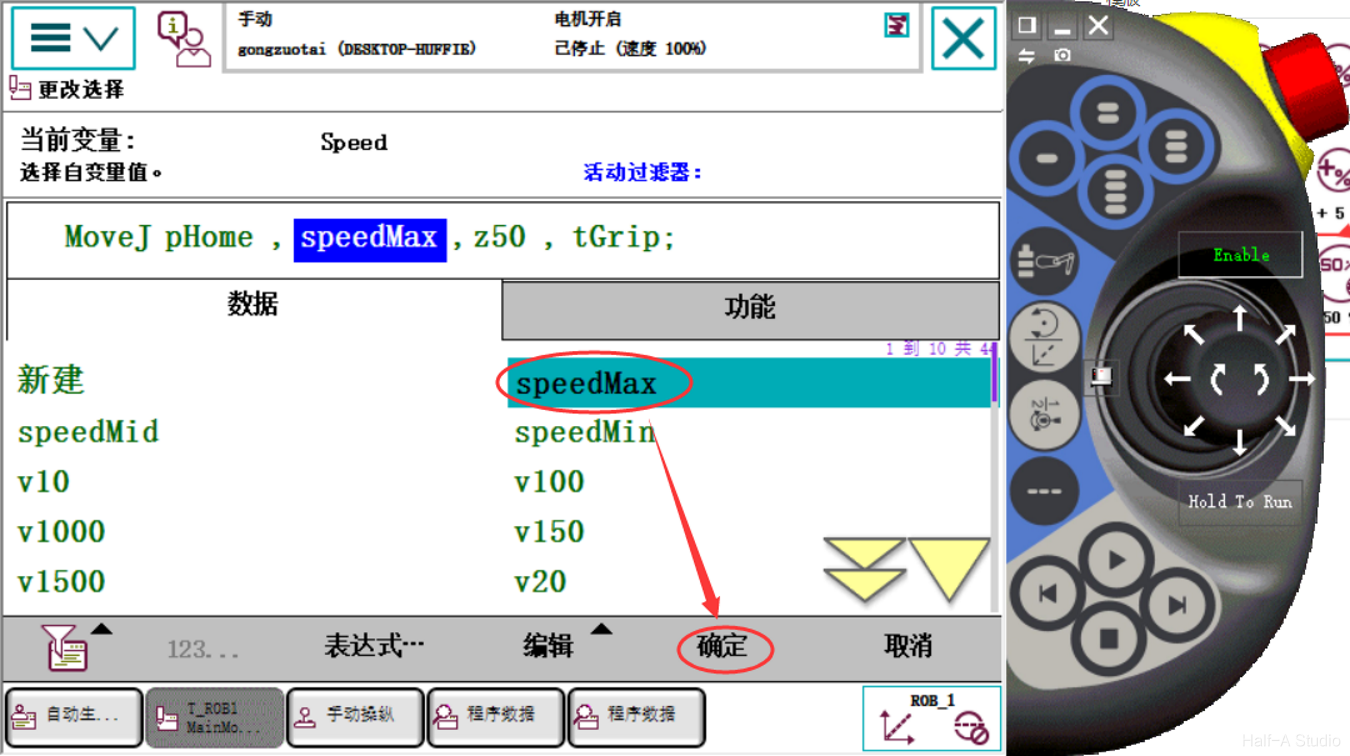
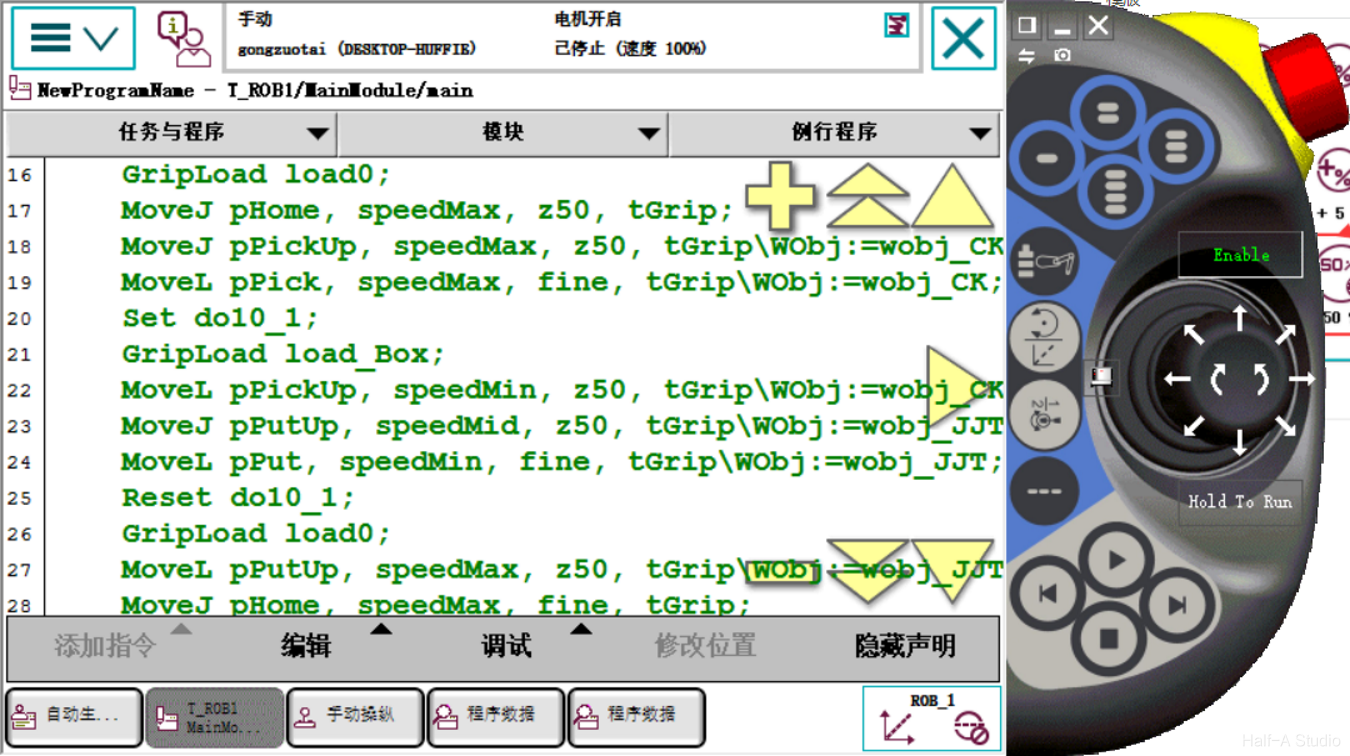
- 回到程序设计页面,点击速度值,选择需要替换的速度变量,确定。
三、速度延时设置
夹爪的加紧动作需要时间,如果不延时的话,夹爪会在加进的同时运动,可能导致一些问题。设置的方法如下:
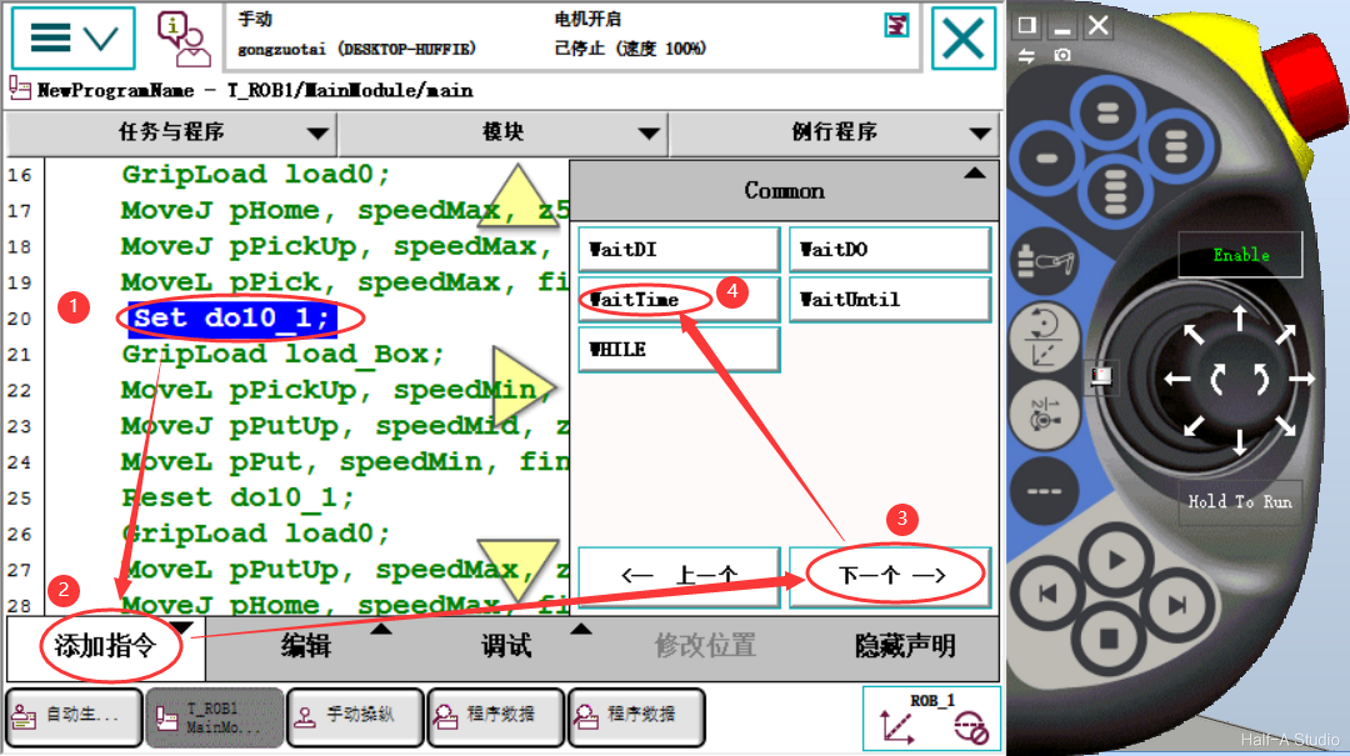
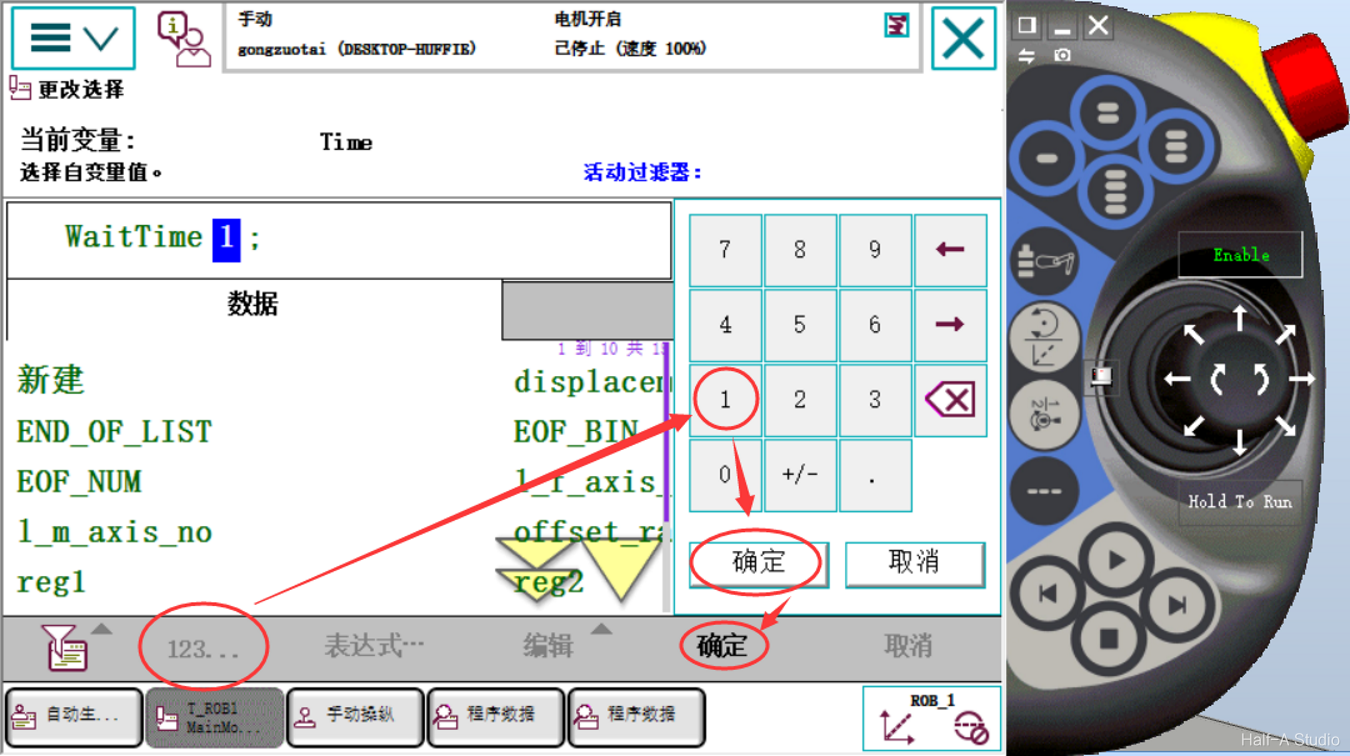
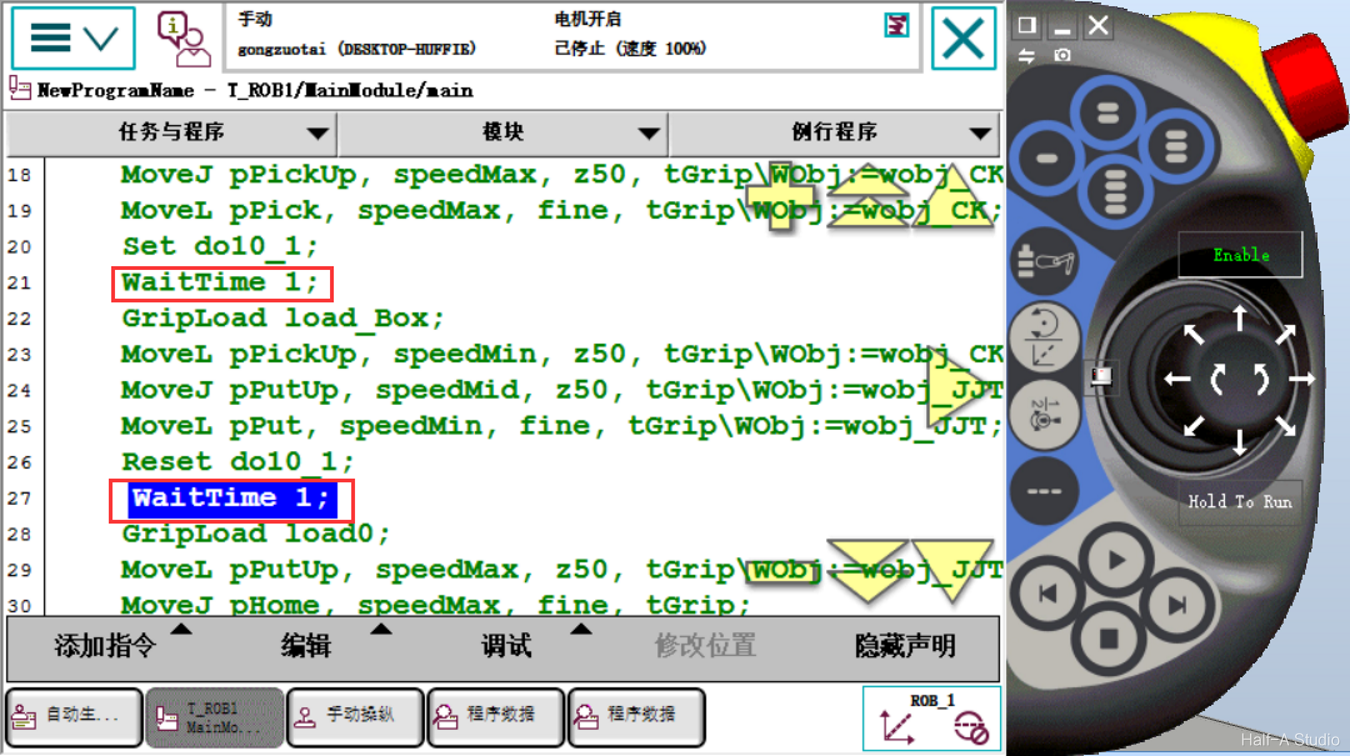
- 点击夹爪夹紧的指令(Set语句),添加指令WaitTime,这里以1s延时为例。
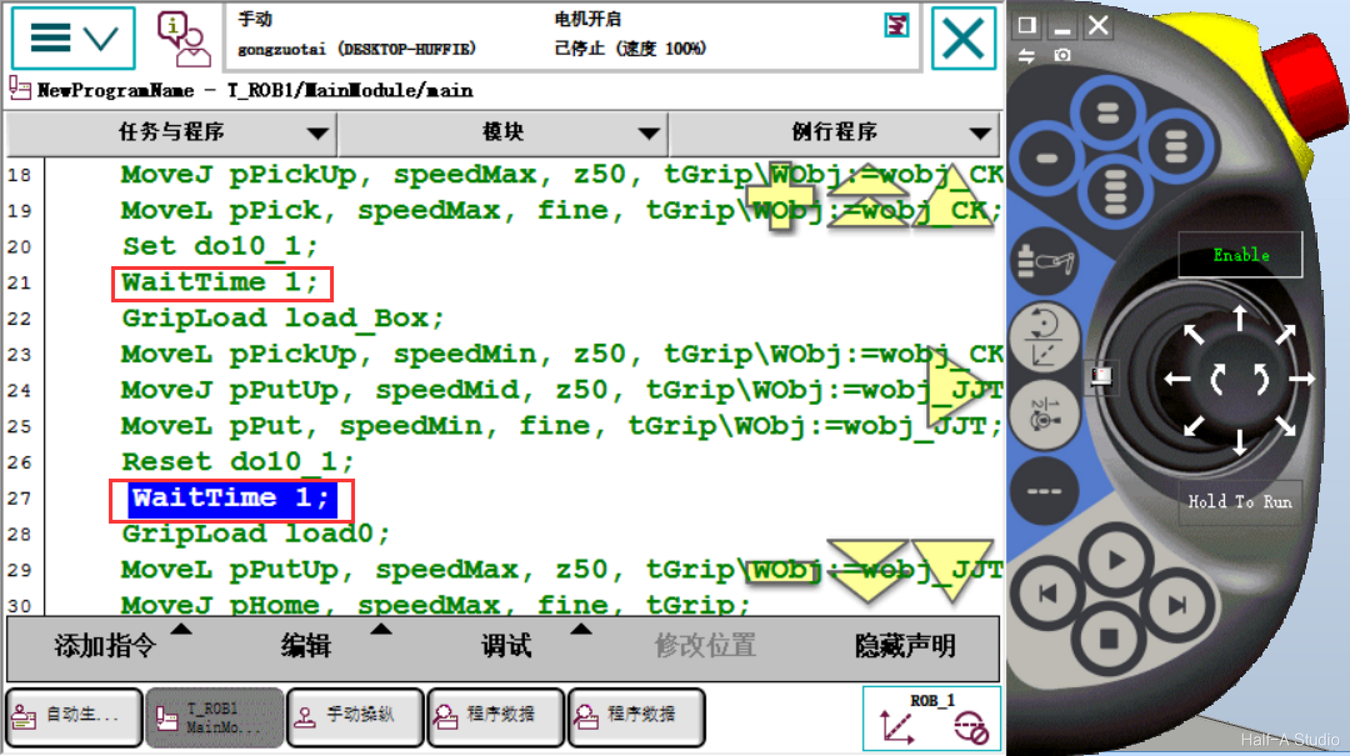
- 同理在夹爪松开时,同样需要进行延时设置。
 微信支付
微信支付 支付宝
支付宝
评论