RobotStudio传送带设计
工作站文件:
链接:https://pan.baidu.com/s/1kikAGbj-vVAH-IR9AWY1sg
提取码:robo
传送带模型的创建
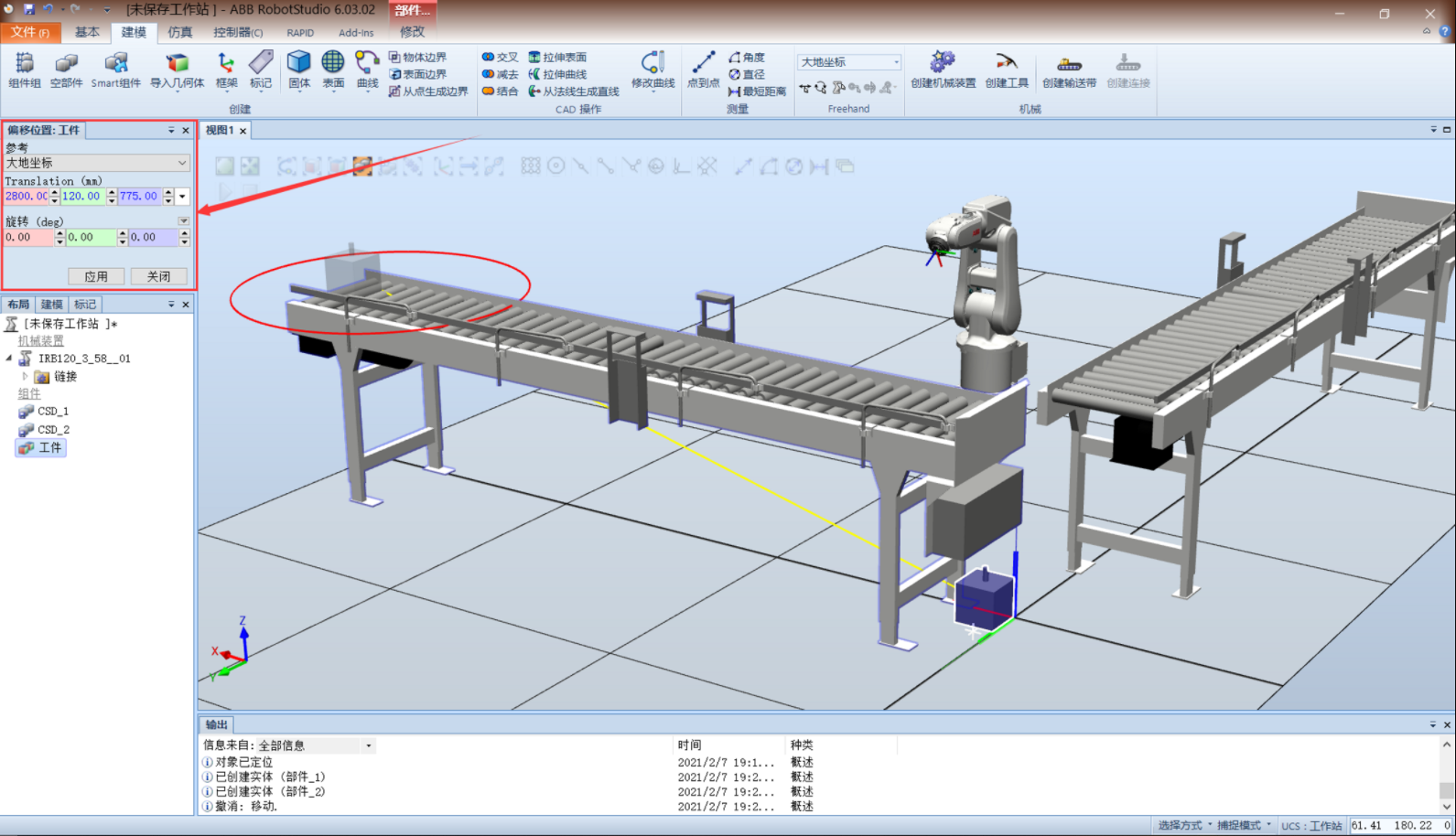
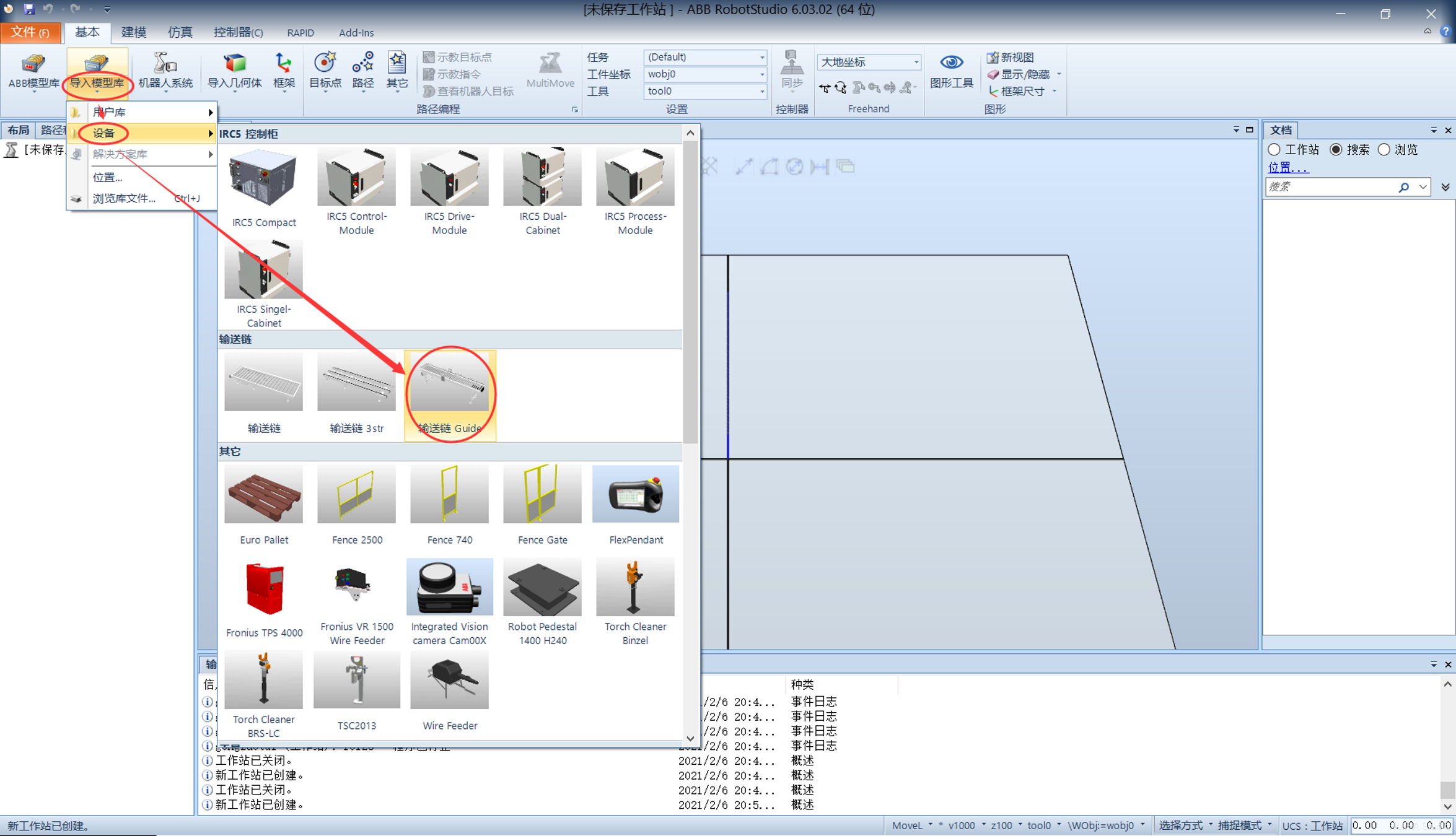
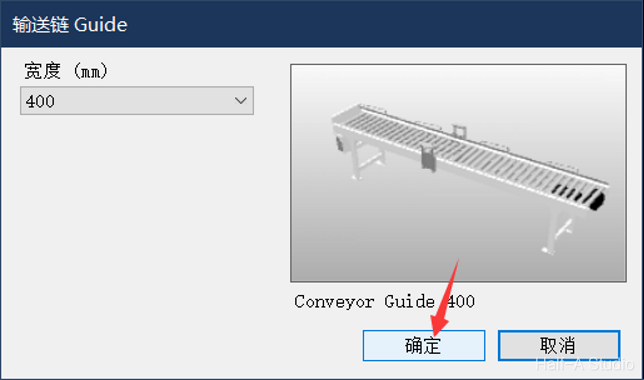
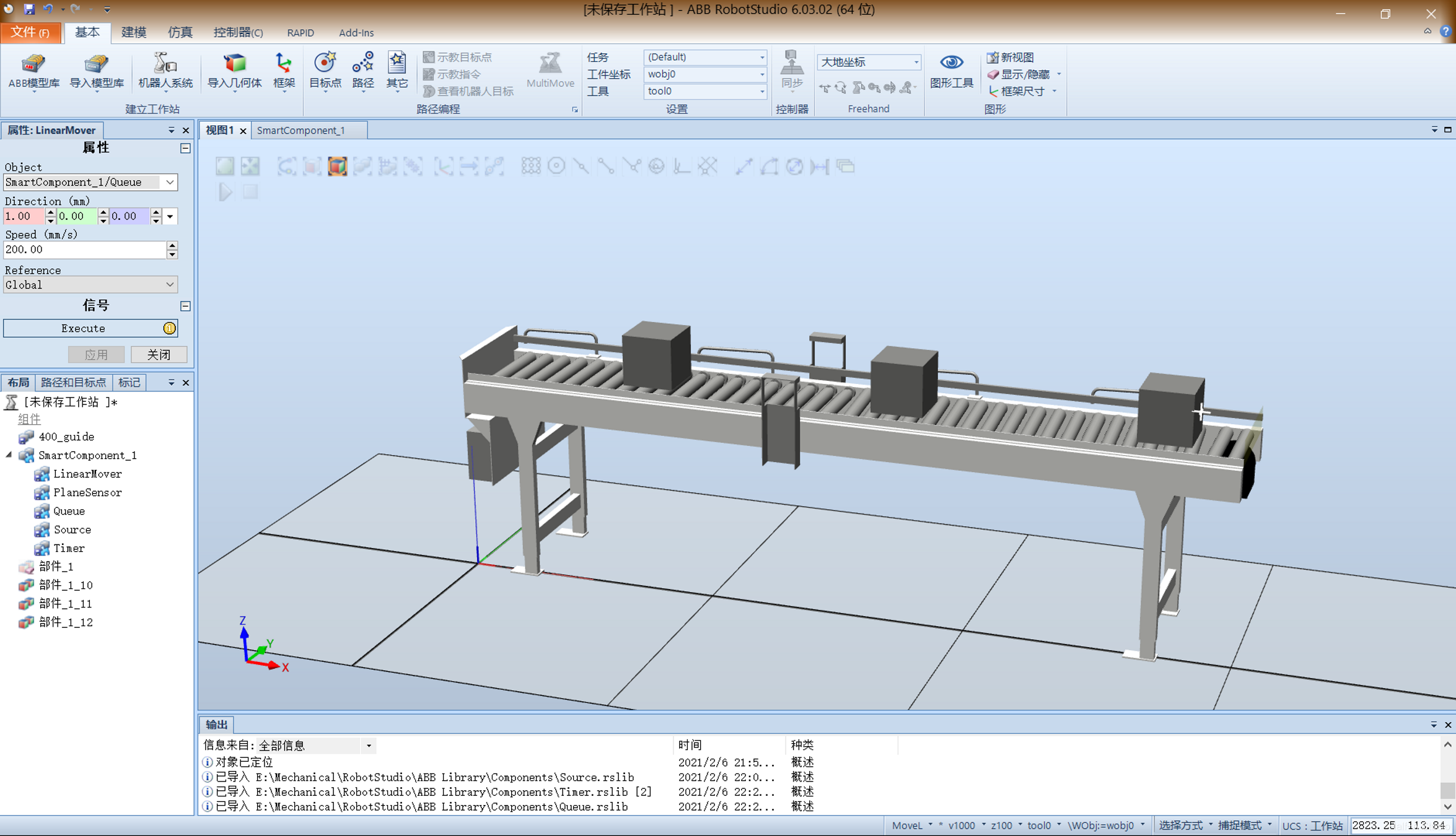
- 新建一个工作站,从设备中导入一个传送带
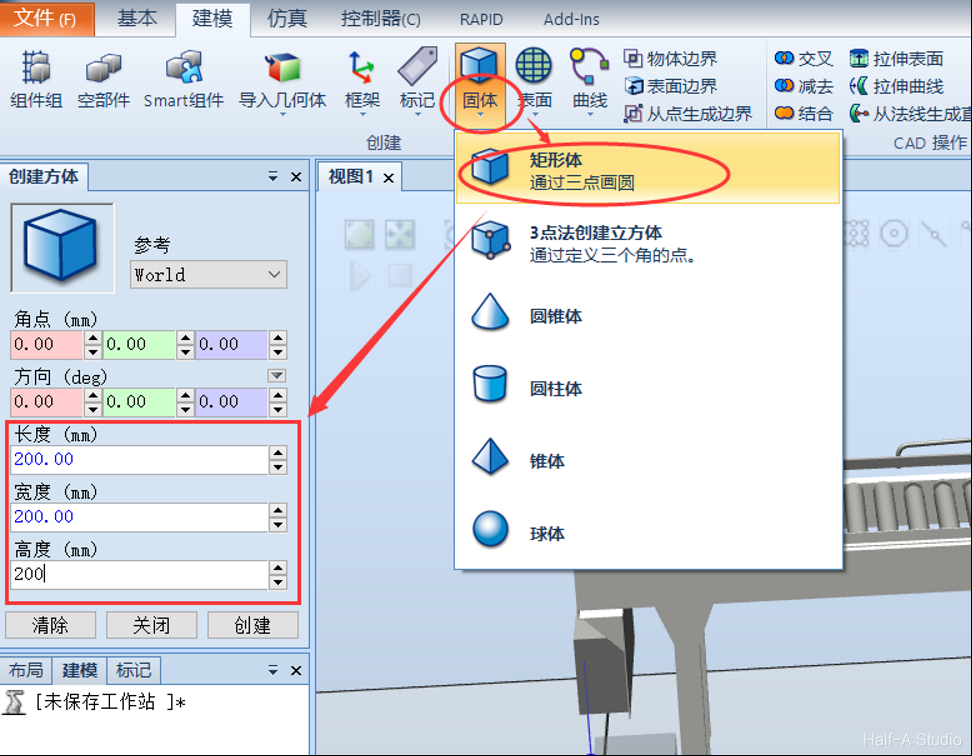
- 创建一个正方体,作为传送带的传送对象
- 将小方块拖动带传送带上我们要的位置处
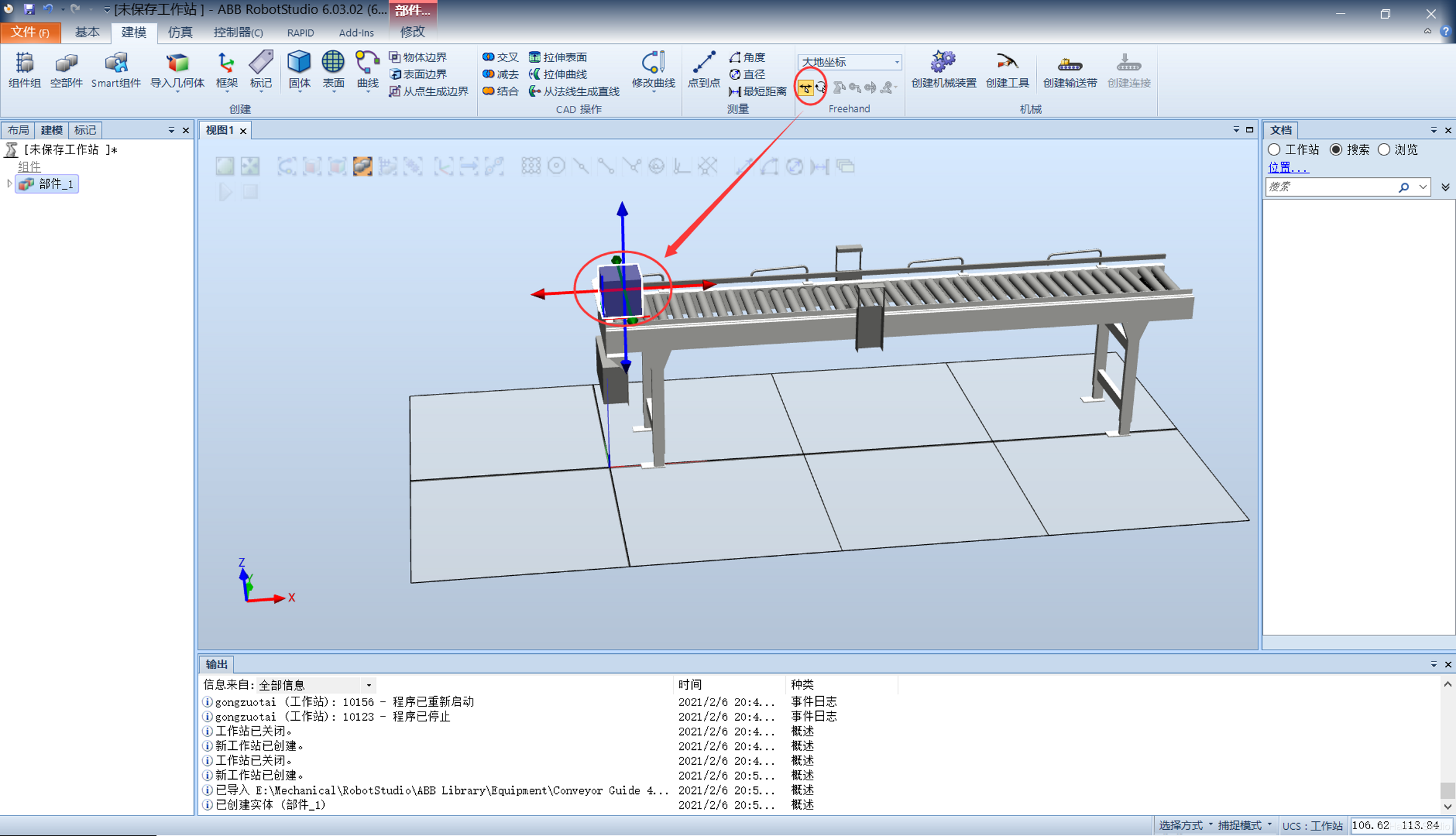
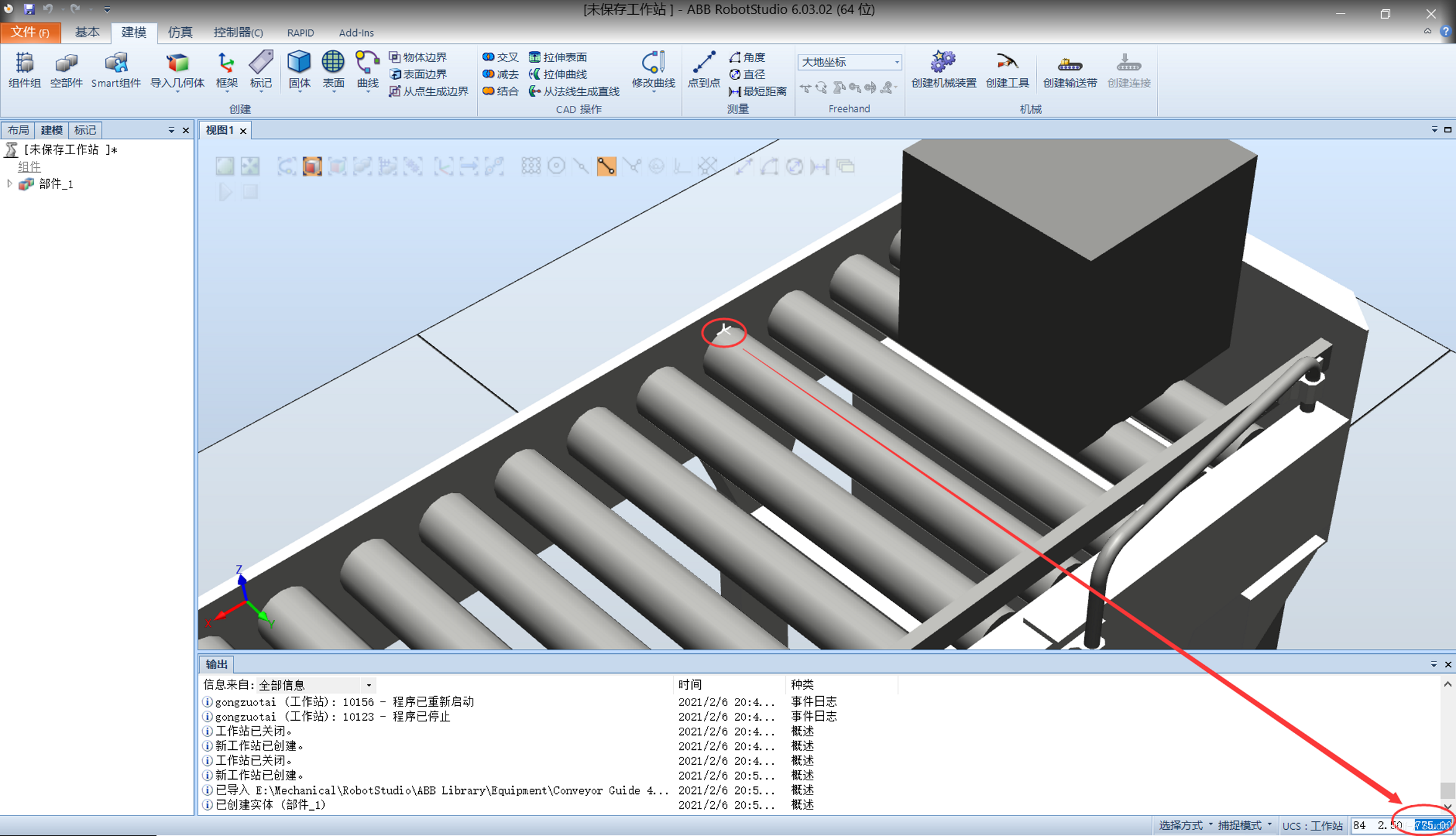
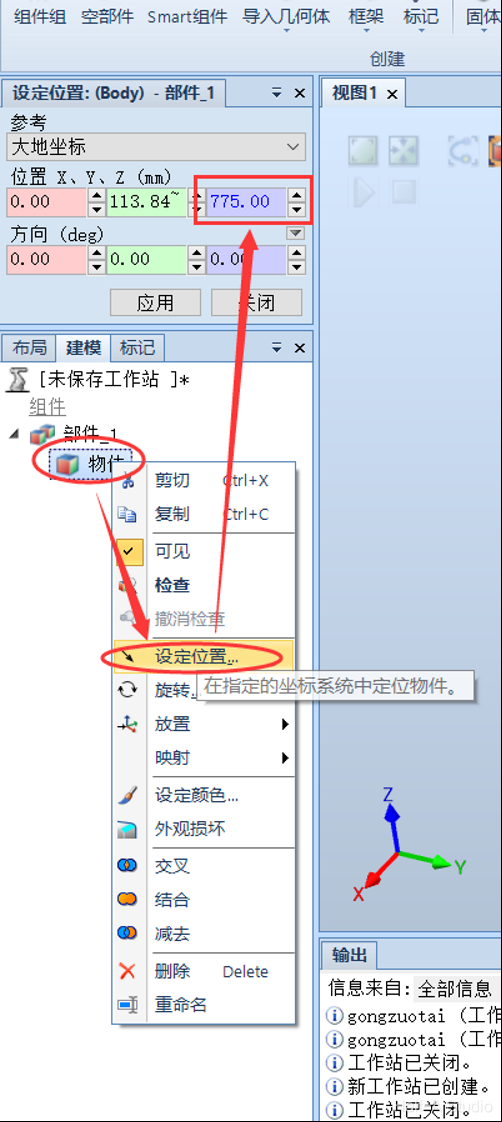
- 可以借助捕捉与设定位置精确定位小方块的位置

简单传送带设计
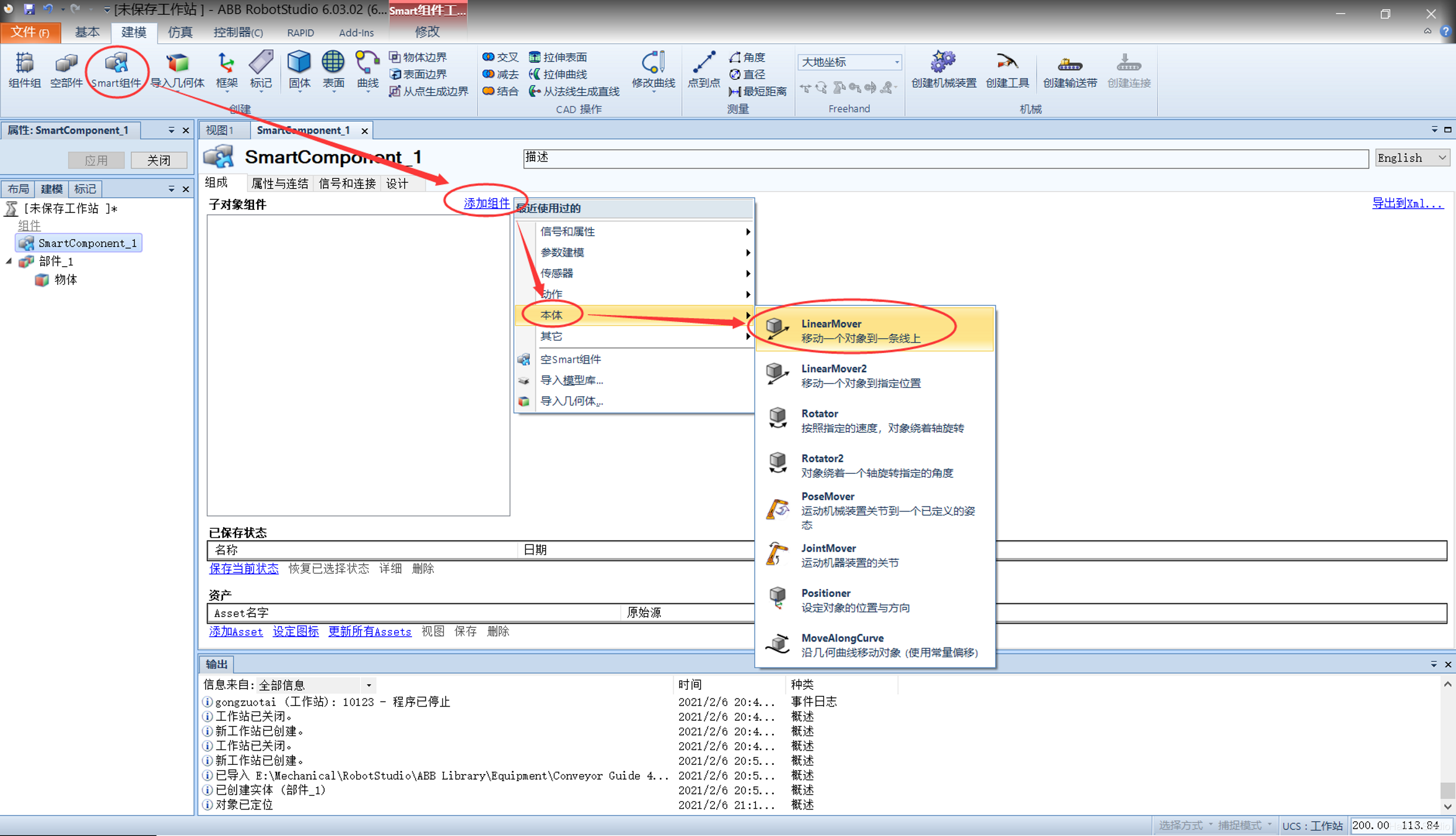
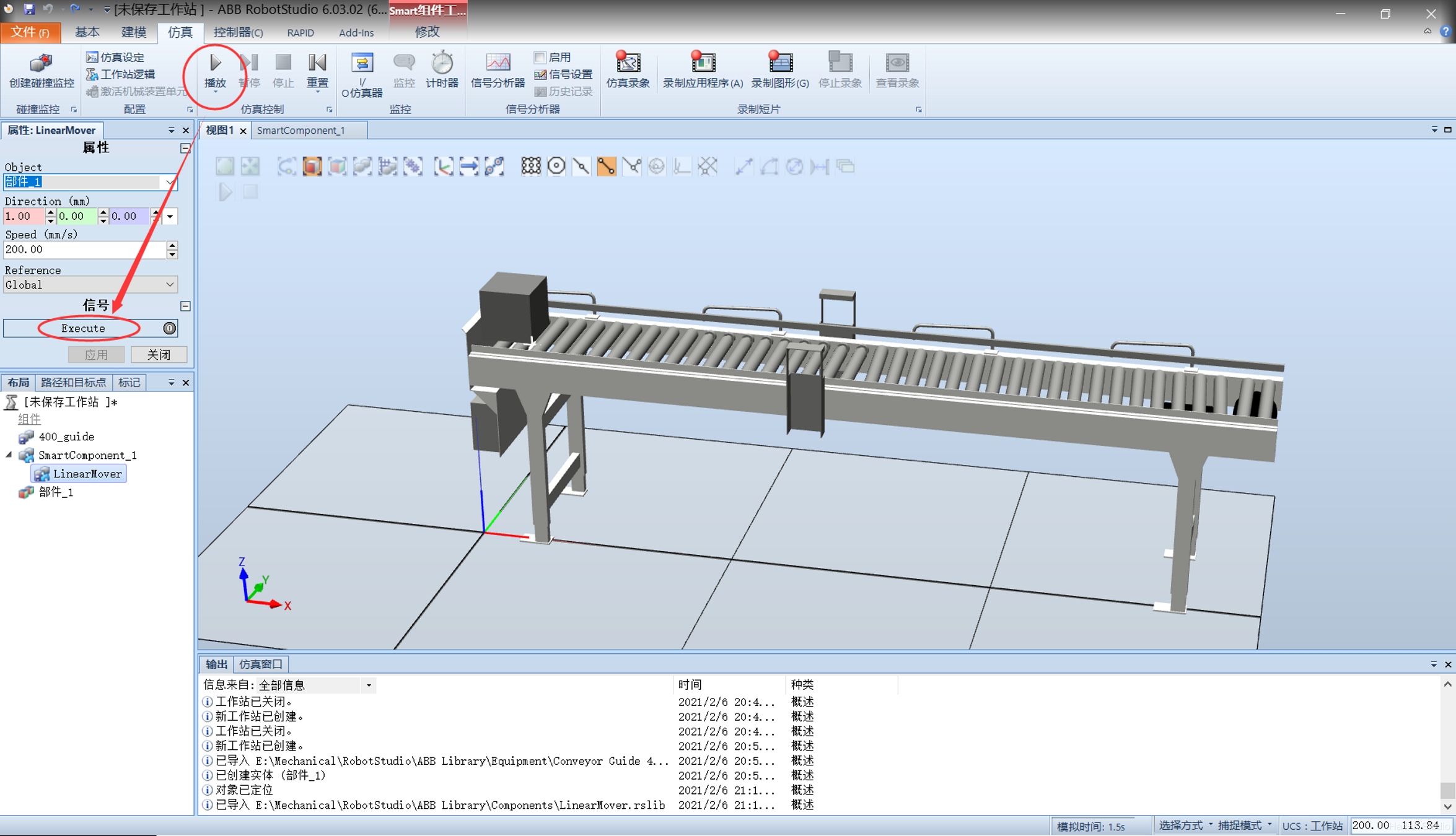
- 建立一个Smart组件,先实现小方块的直线移动

- 点击仿真-播放,然后点击Smart组件的Execute按钮,即可观察到小方块的直线运动。但是小方块无法自行停止,需要点击停止按钮,然后重置,才能回到初始状态。
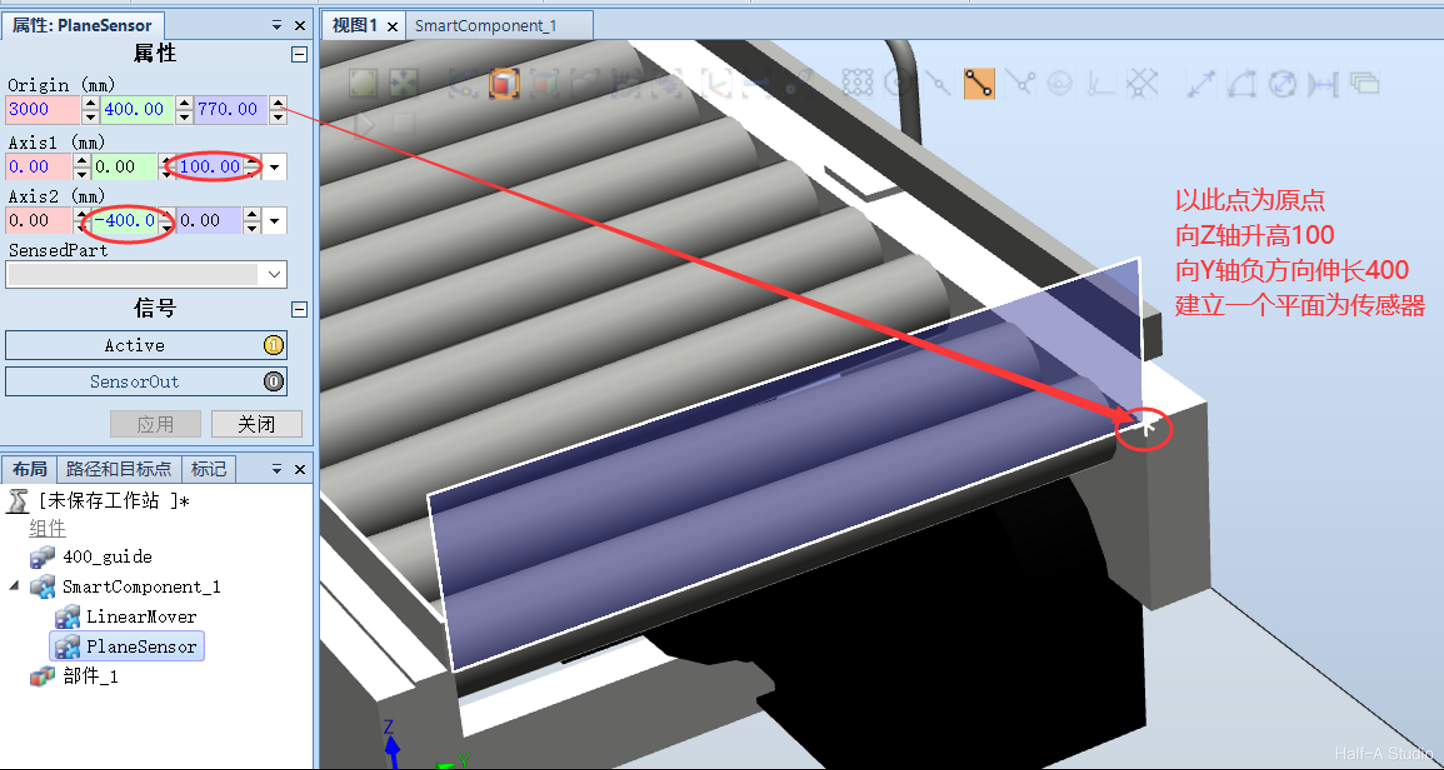
- 添加一个面传感器用于检测小方块的位置

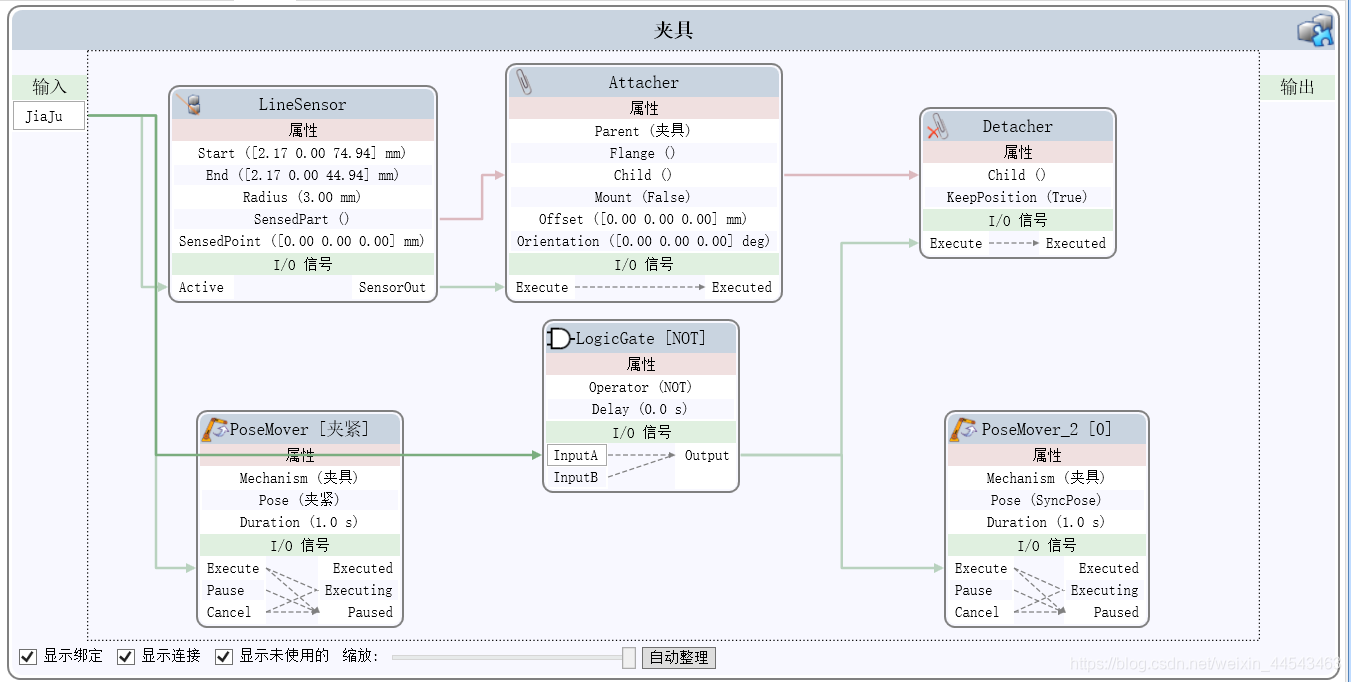
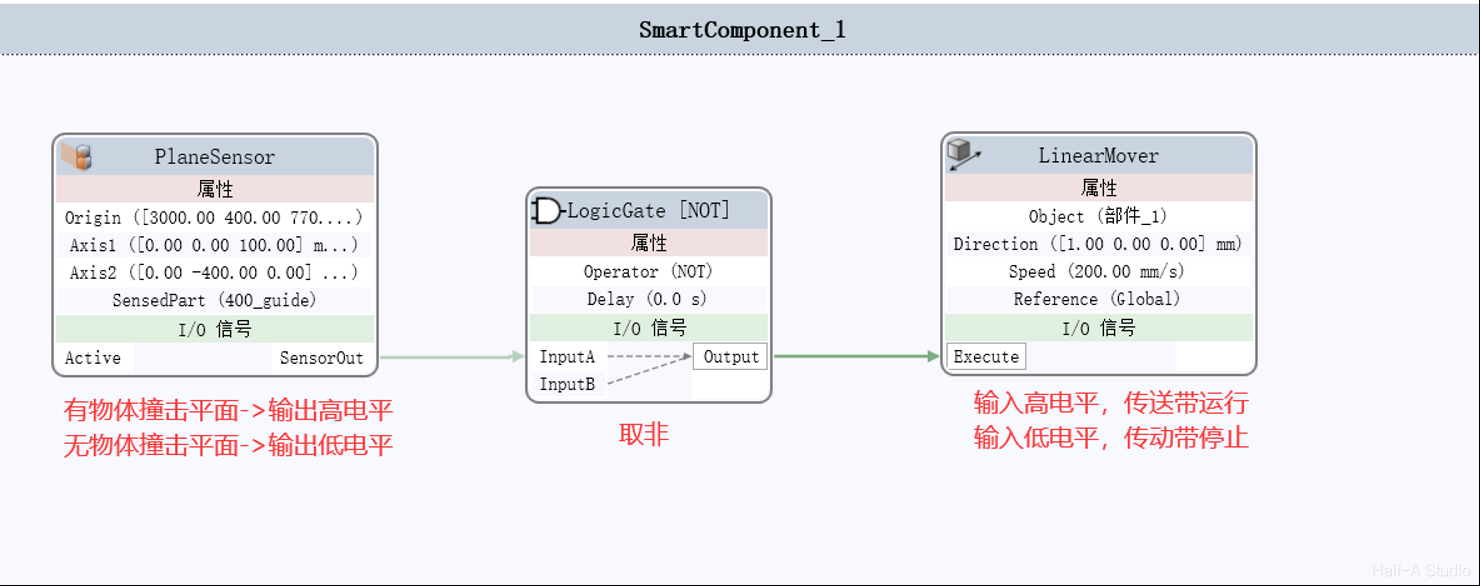
- 回到Smart组件的设计页面,设计逻辑程序,因为传送带的逻辑是输入端有高电平就运行,传感器的逻辑是有物体触碰就输出高电平,其他时间输出低电平。因此要实现传送带的要求,只需要将传感器的输出取非后传给传动带即可。

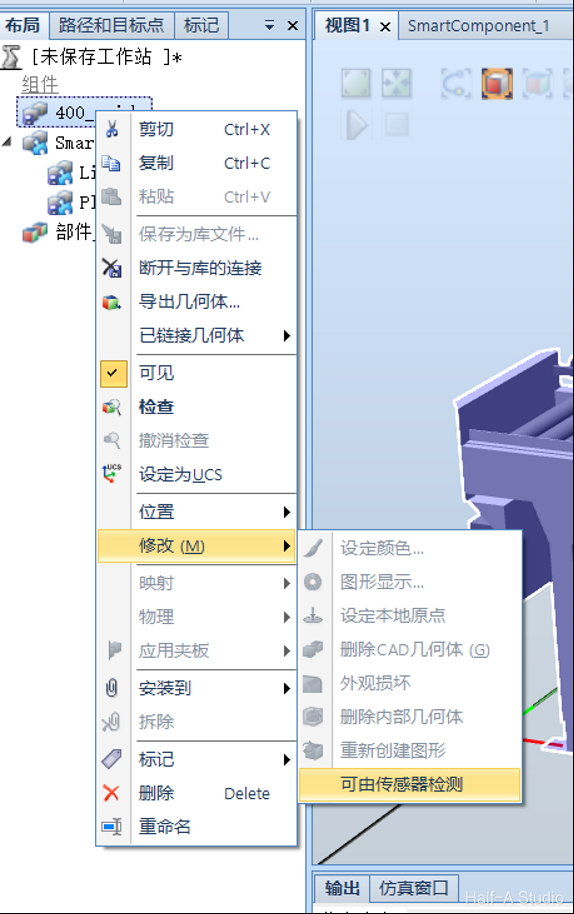
- 进行仿真,发现传送带与小方块的运行效果符合预期。如果发现小方块不停止的话,将传送带的可由传感器检测取消掉就可以了
多个物体的连续传送
- 添加一个Source组件用于实现小方块的复制,编辑它的属性

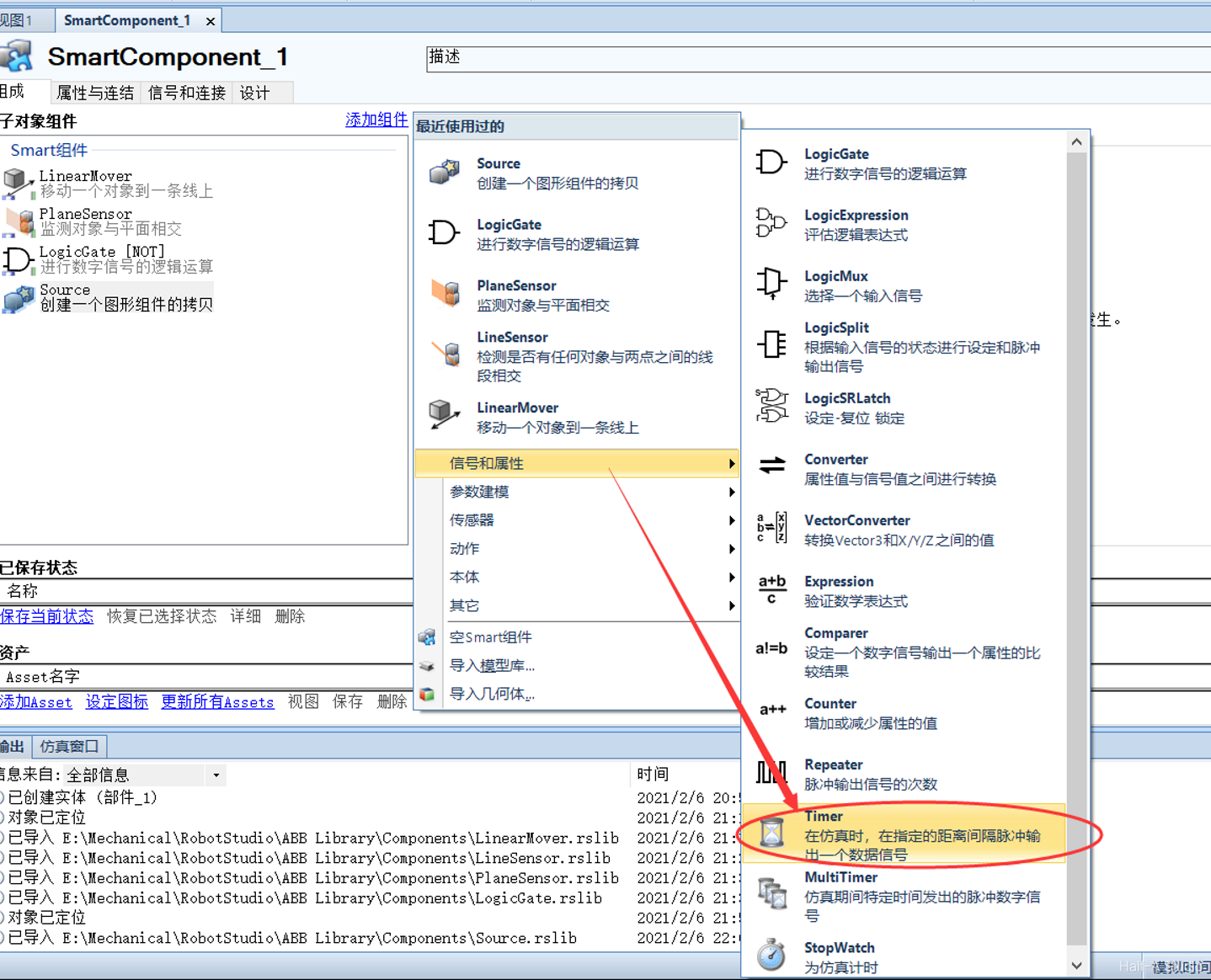
复制源Source选择小方块,位置通过捕捉本地原点选择小方块的原点,点击应用。 - 然后进行复制小方块的程序设计由于Source组件的触发条件是上升沿,即低脉冲跃变到高脉冲时,才会触发复制效果。

因此考虑添加一个脉冲信号的发生组件Timber,信号间隔暂定为5s。
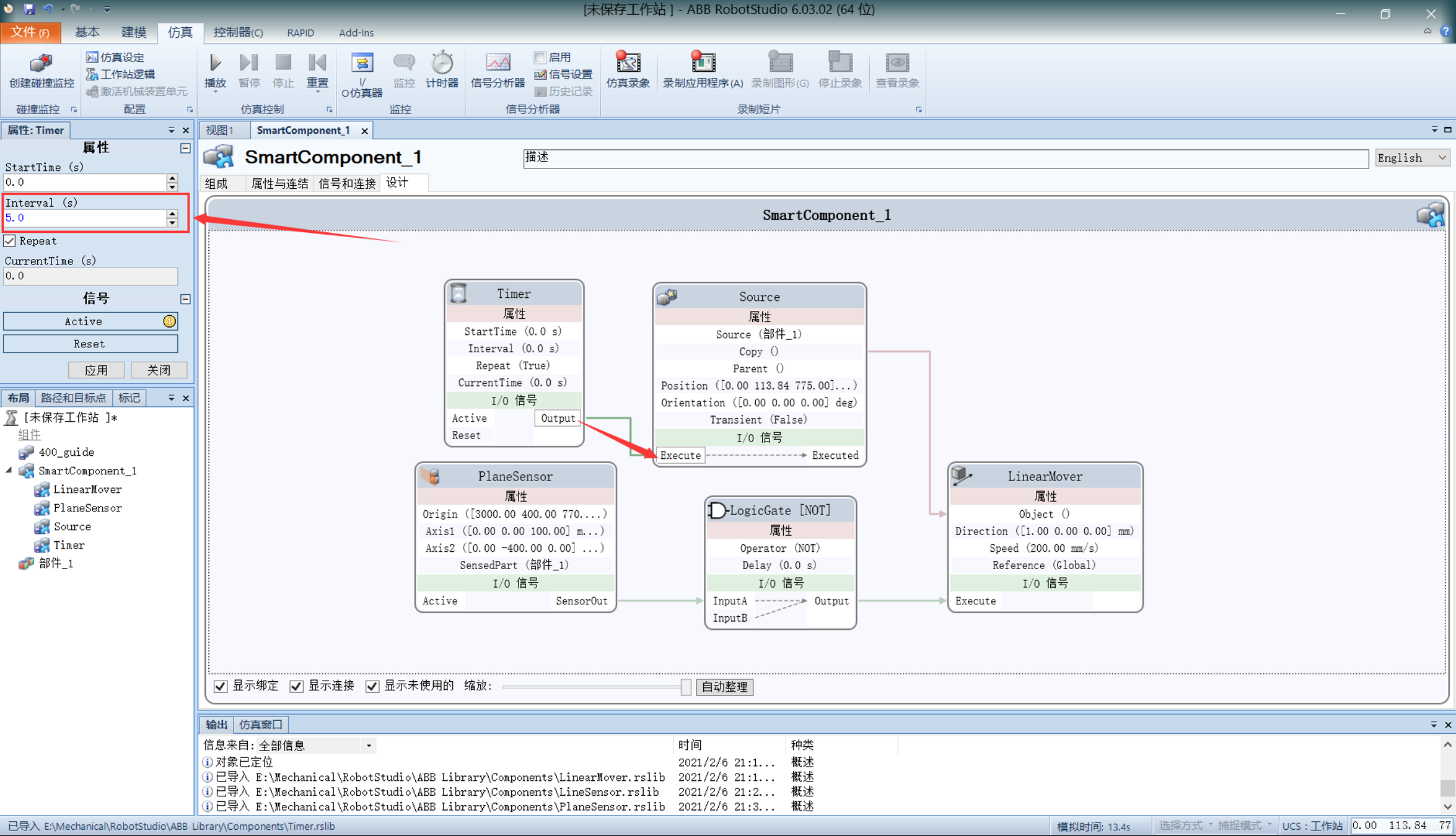
- 但是这样带来的问题是,在第一个小方块还未到终点时,因为时间已经到了5s,因此传送带会开始运送下一个小方块,仿真表现是所有小方块运动5s后会自动停止。因此选择使用队列这个组件来解决问题。
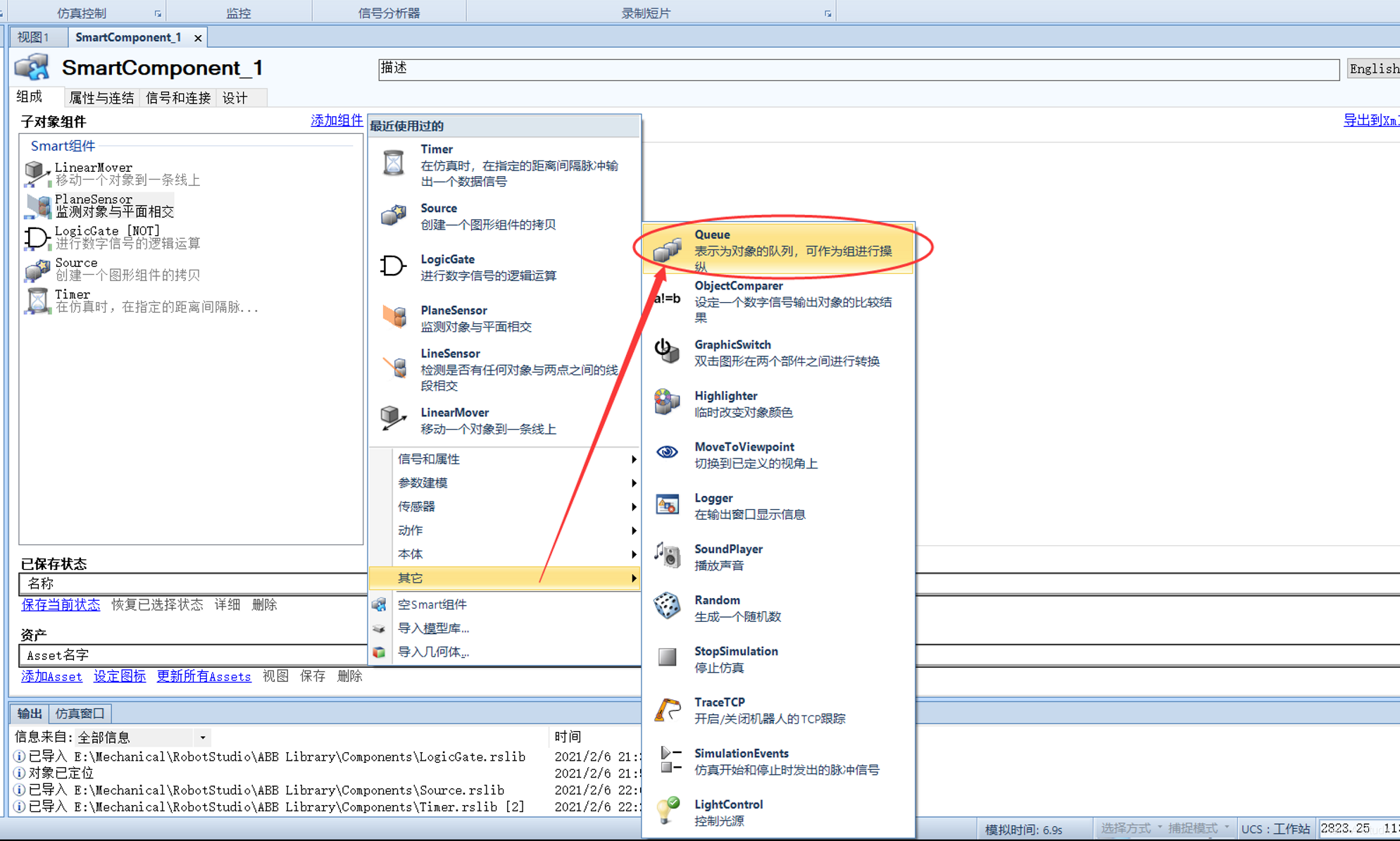

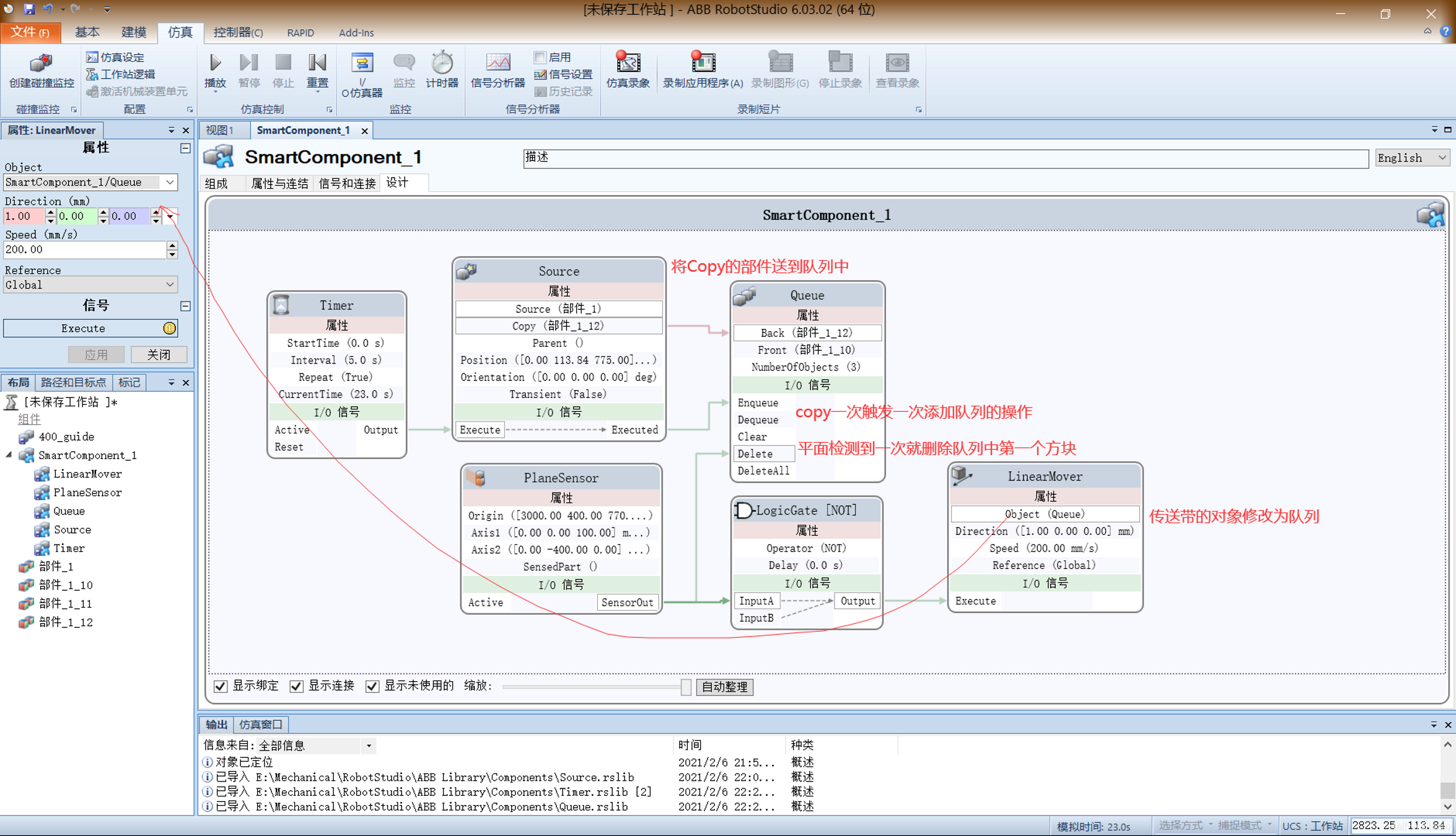
- back:将复制出来的小方块添加到队列后面
- delete:删除队列中最前面的物体
- enqueue:接收到复制完成的信号后开始将对象添加到队列中
- 传送带的传送对象需要改为整个队列
仿真效果如下(可将原始方块部件_1取消可见,显示效果更好)
 微信支付
微信支付 支付宝
支付宝
评论