RobotStudio动态夹具的创建
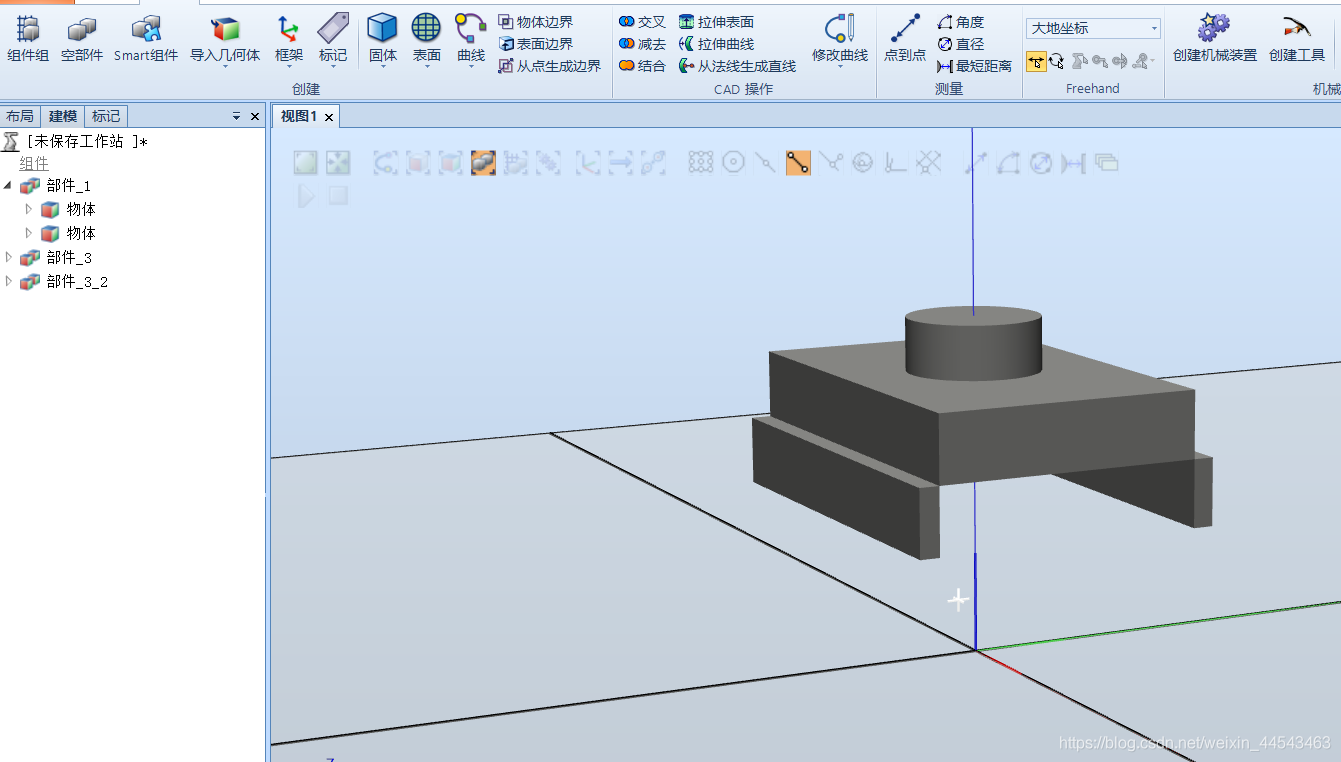
创建夹具的几何模型
如果你有其它建模软件如Solidworks等做的夹具模型,可以导入到RobotStudio中。
这里简单建模,主要展示动态夹具的创建流程。
- 创建夹具的本体
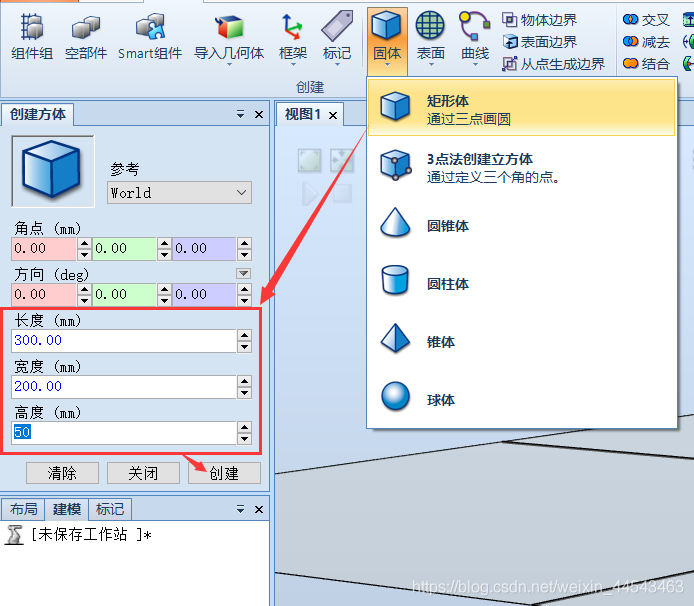
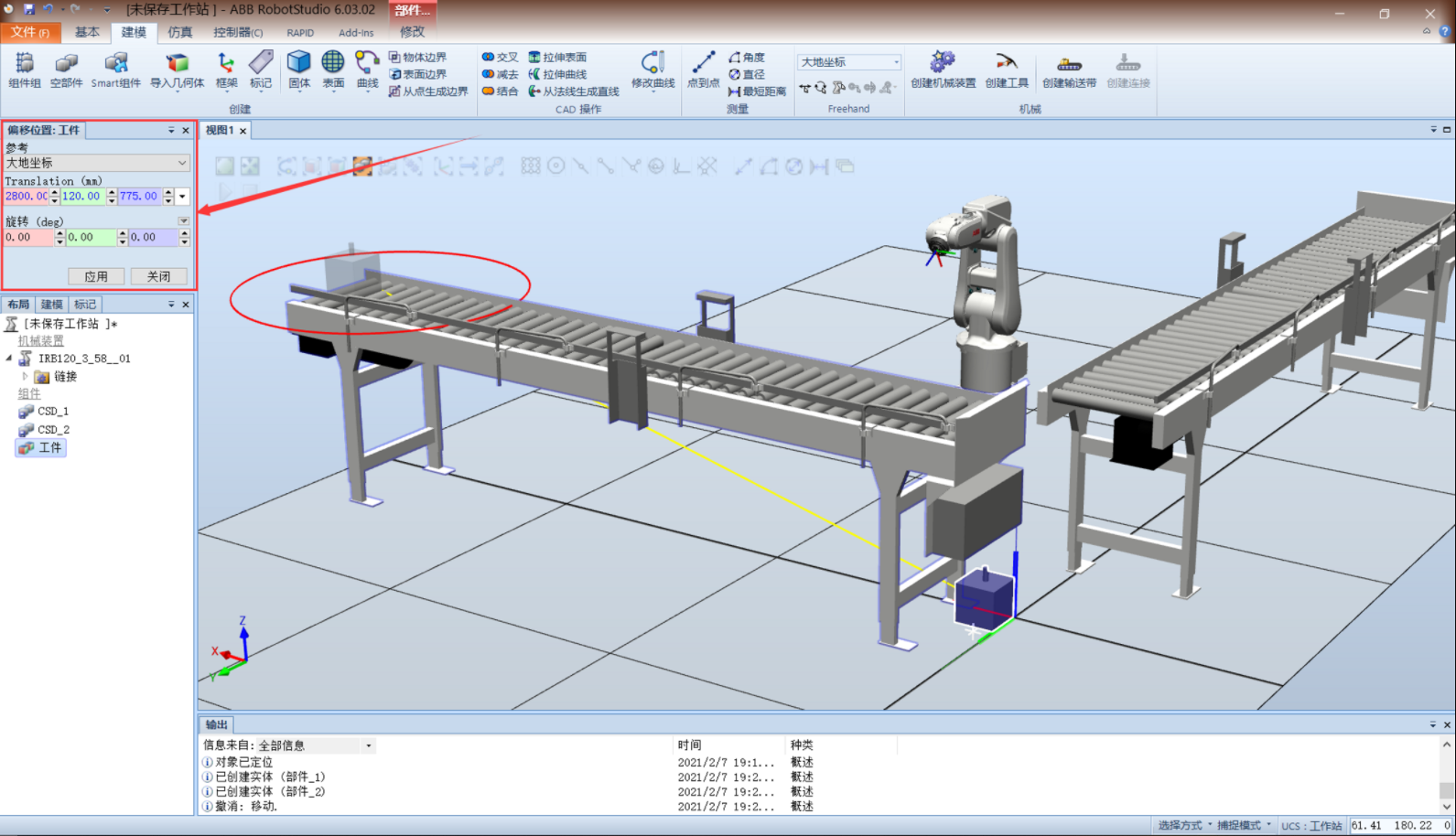
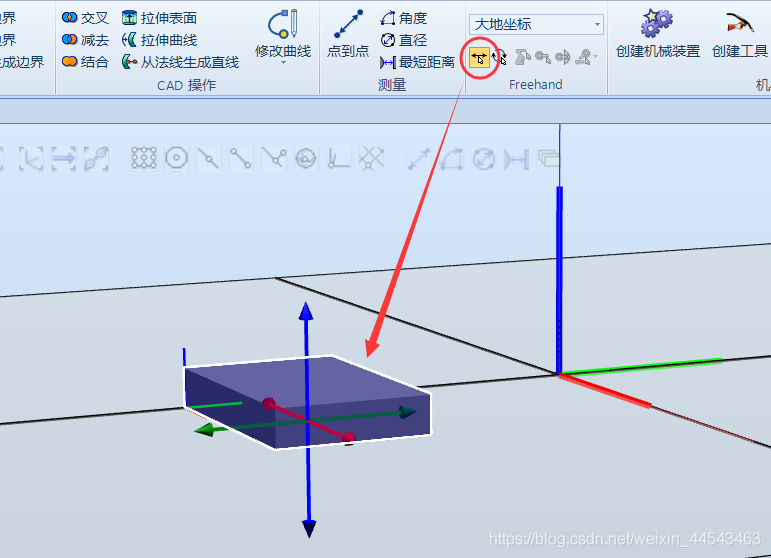
- 将其移动到其他位置,准备创建夹具的其他部分
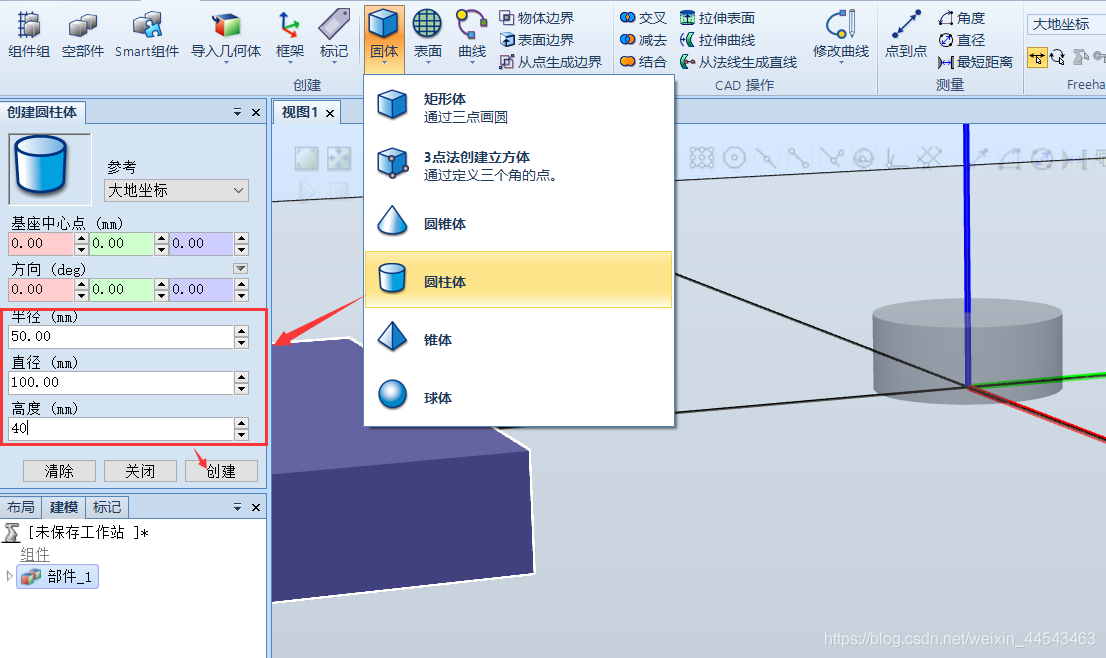
- 创建一个圆柱,作为夹具的法兰盘,与机器人的关节末端相连
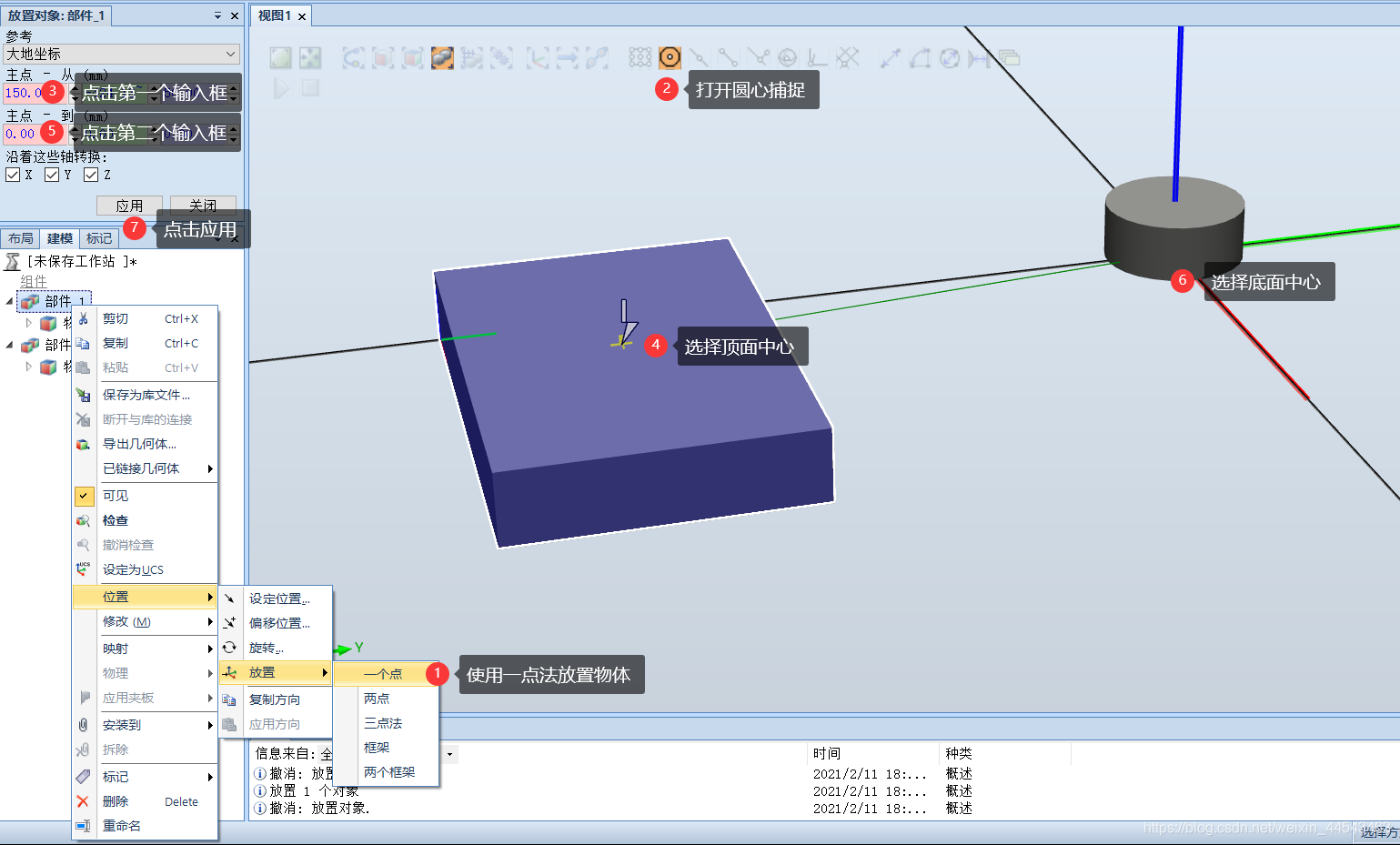
- 移动长方体的位置。
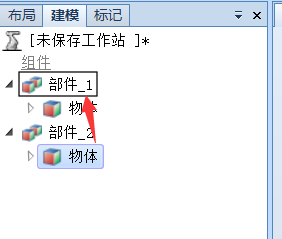
- 将部件2的物体拖动到部件1上,将两个物体组合成一个部件。
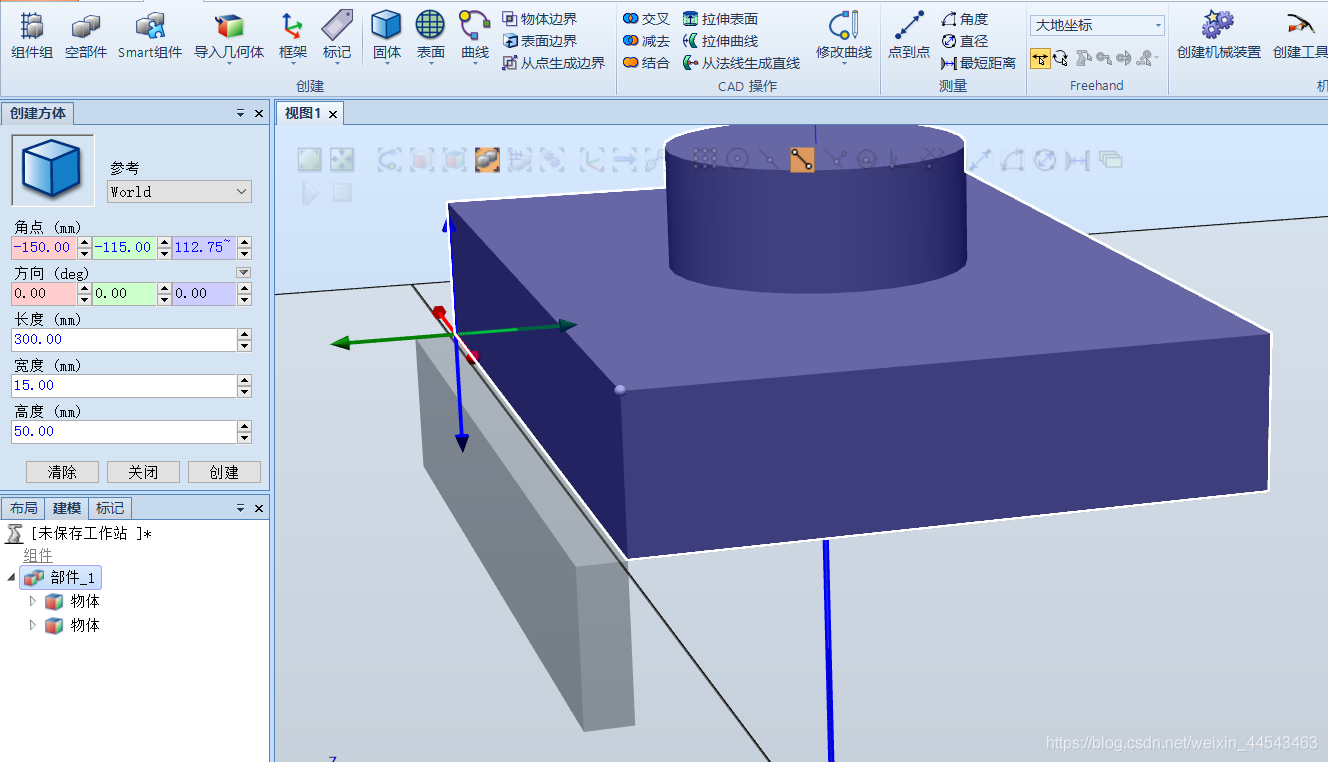
- 创建夹爪
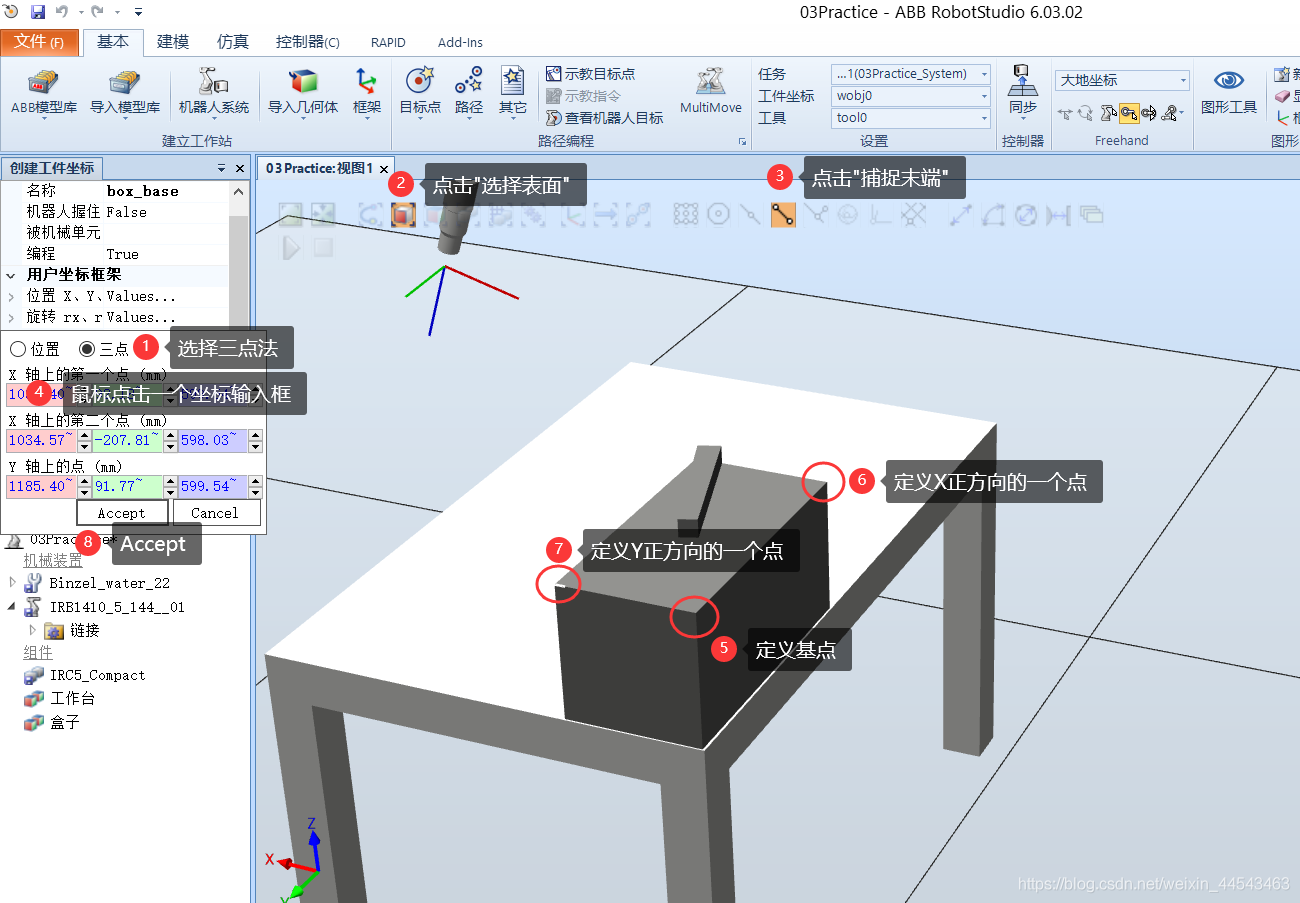
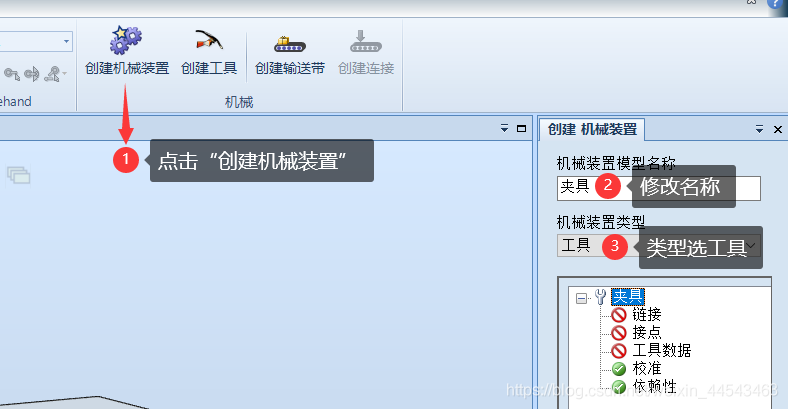
创建机械装置
- 点击创建机械装置,装置名称写“夹具”,装置类型选“工具”
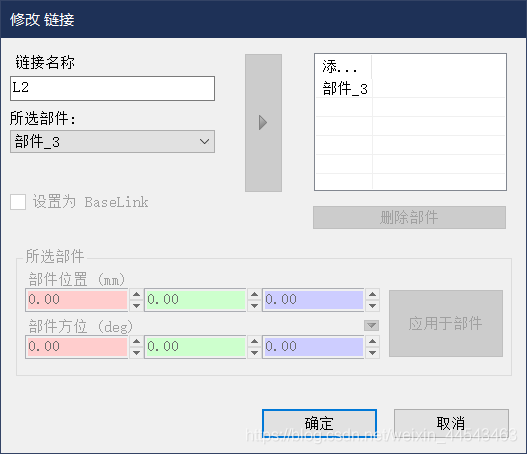
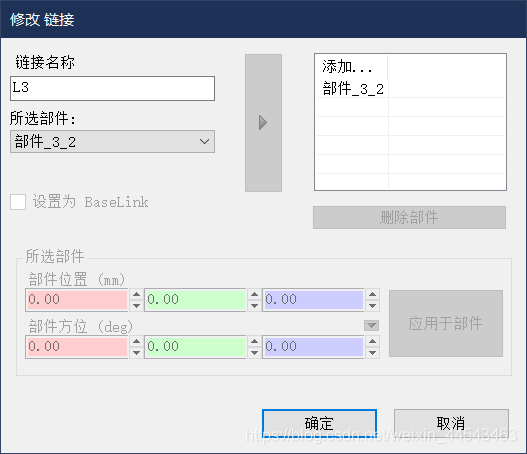
- 添加链接,为刚才创建的三个部件分别添加链接。如果是导入的模型,也需要为各个部件添加链接。其中基座部分需要勾选BaseLink,其它部分不需要。


-
创建接点
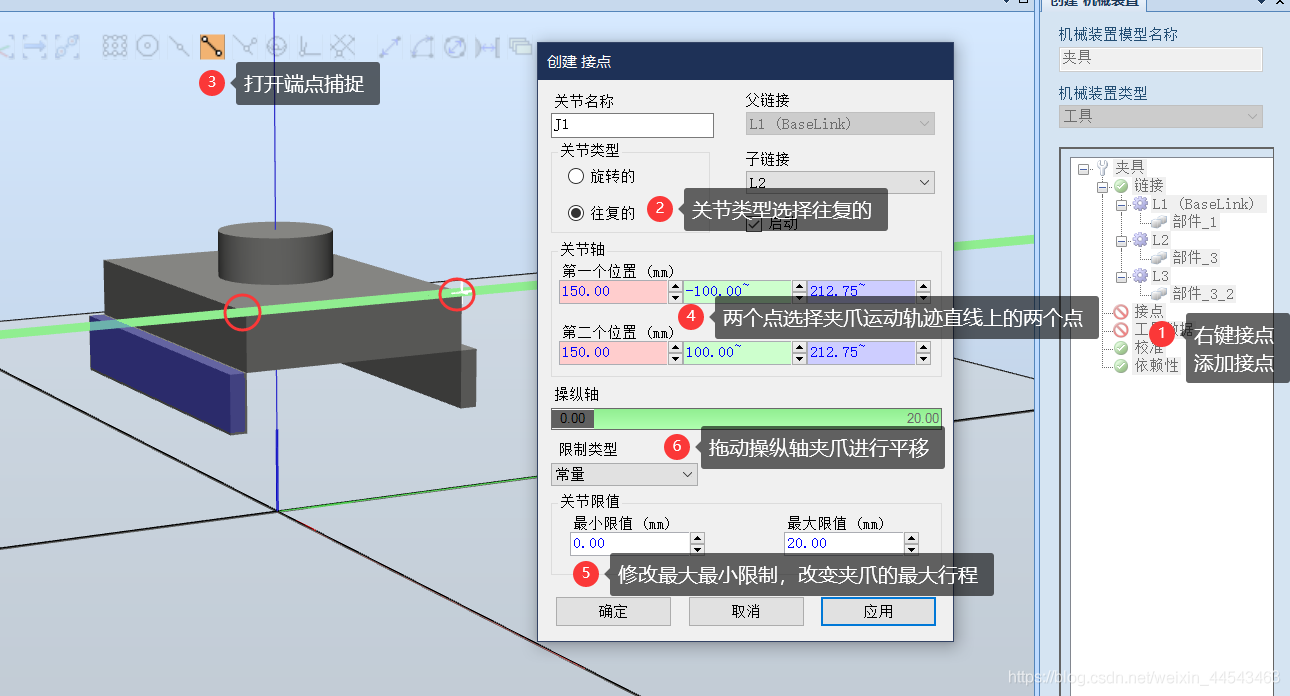
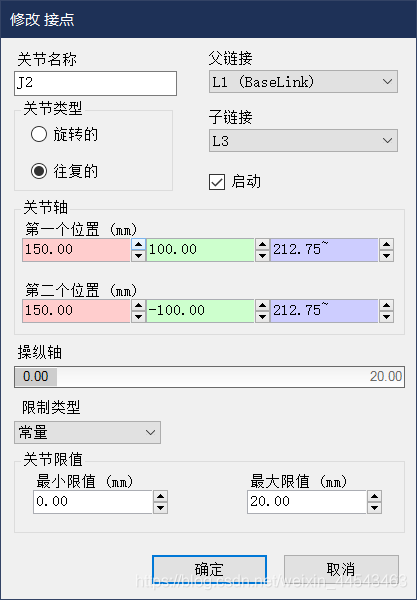
-
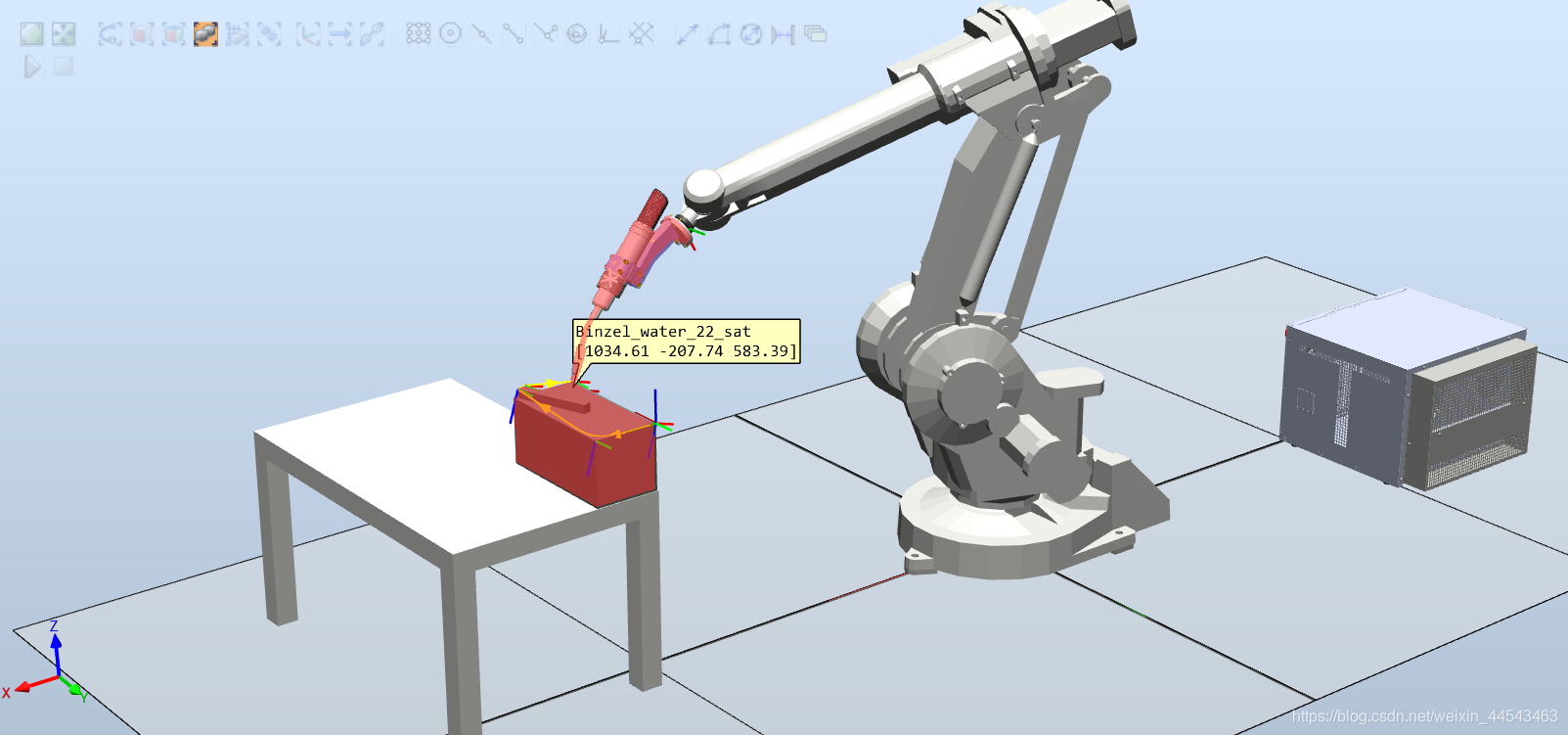
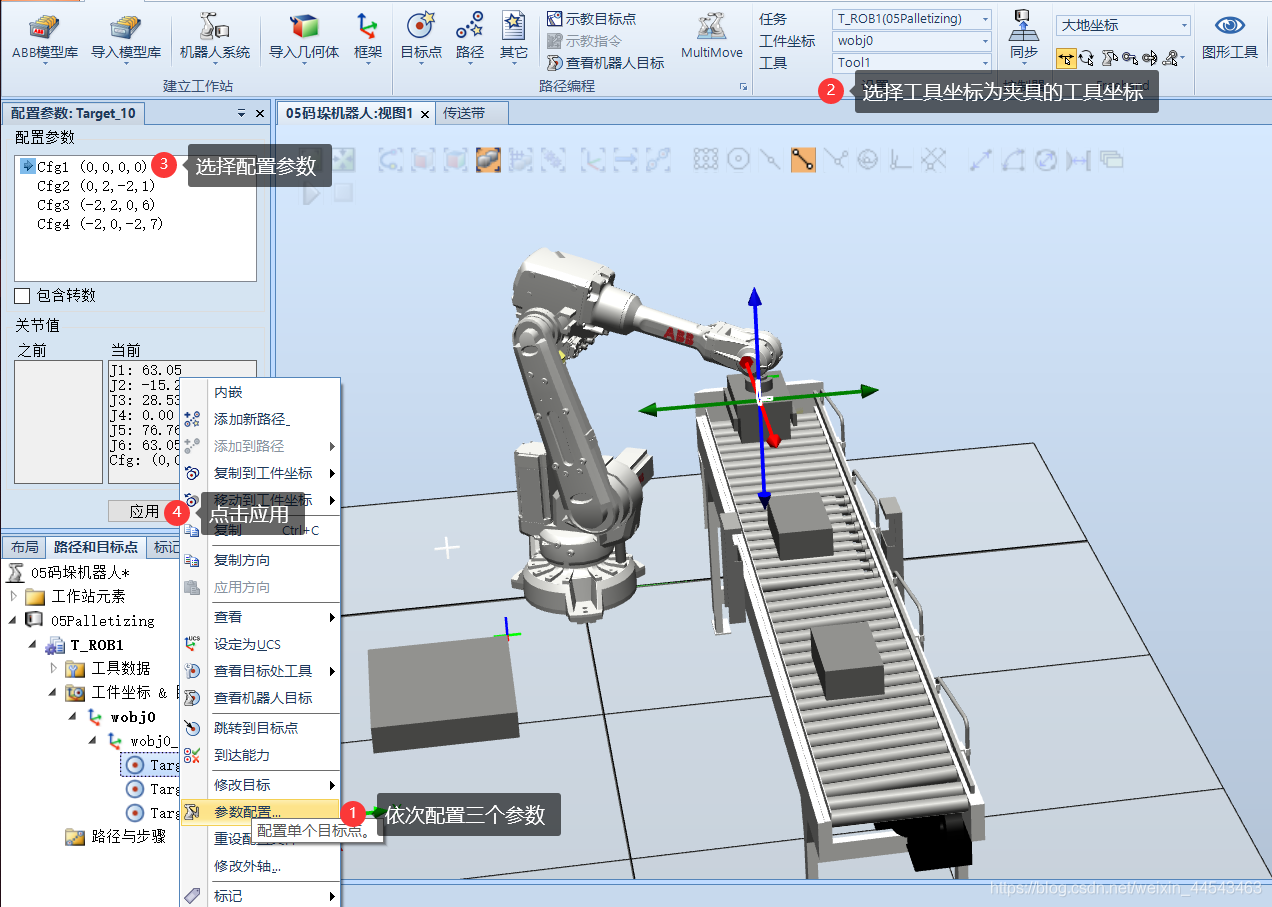
创建工具数据
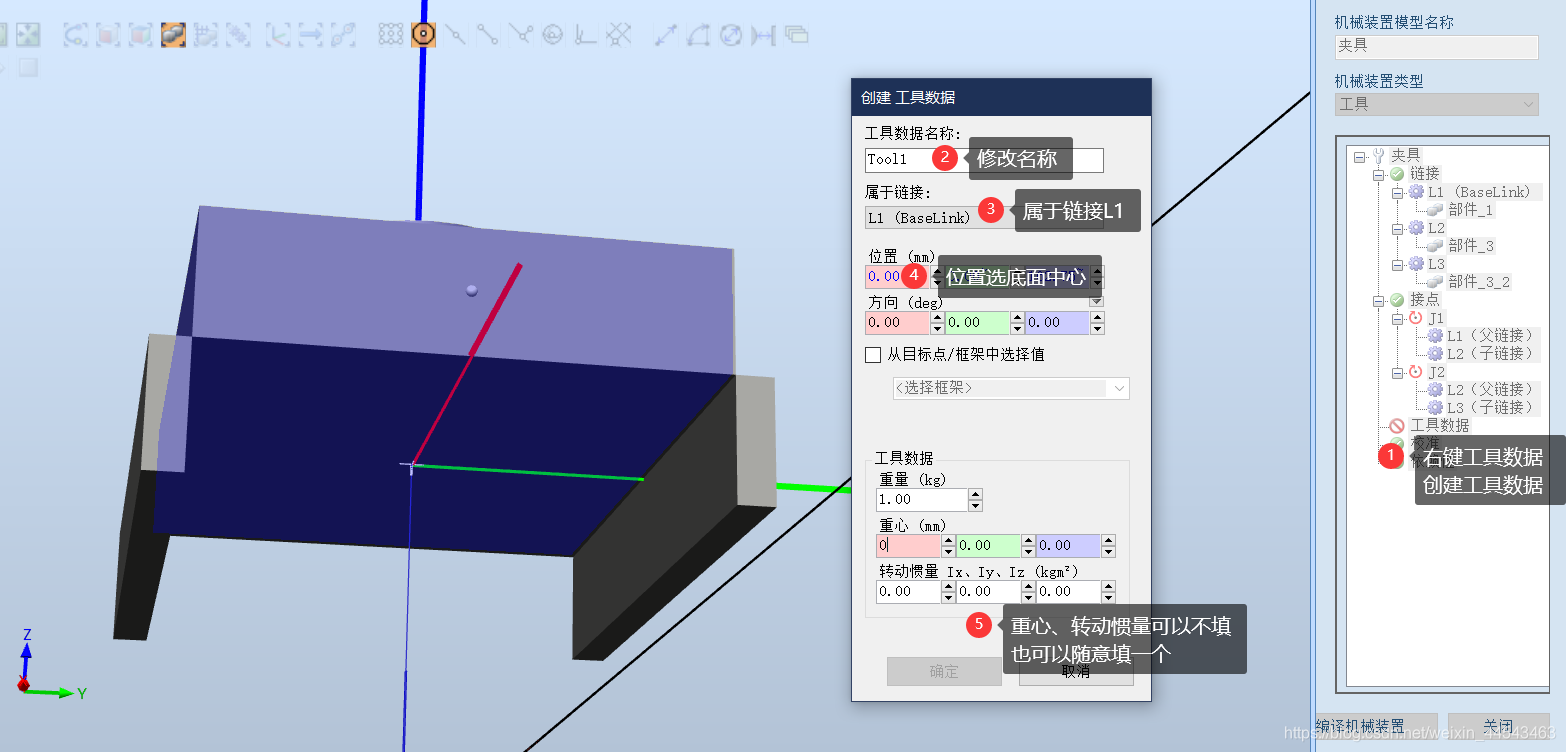
-
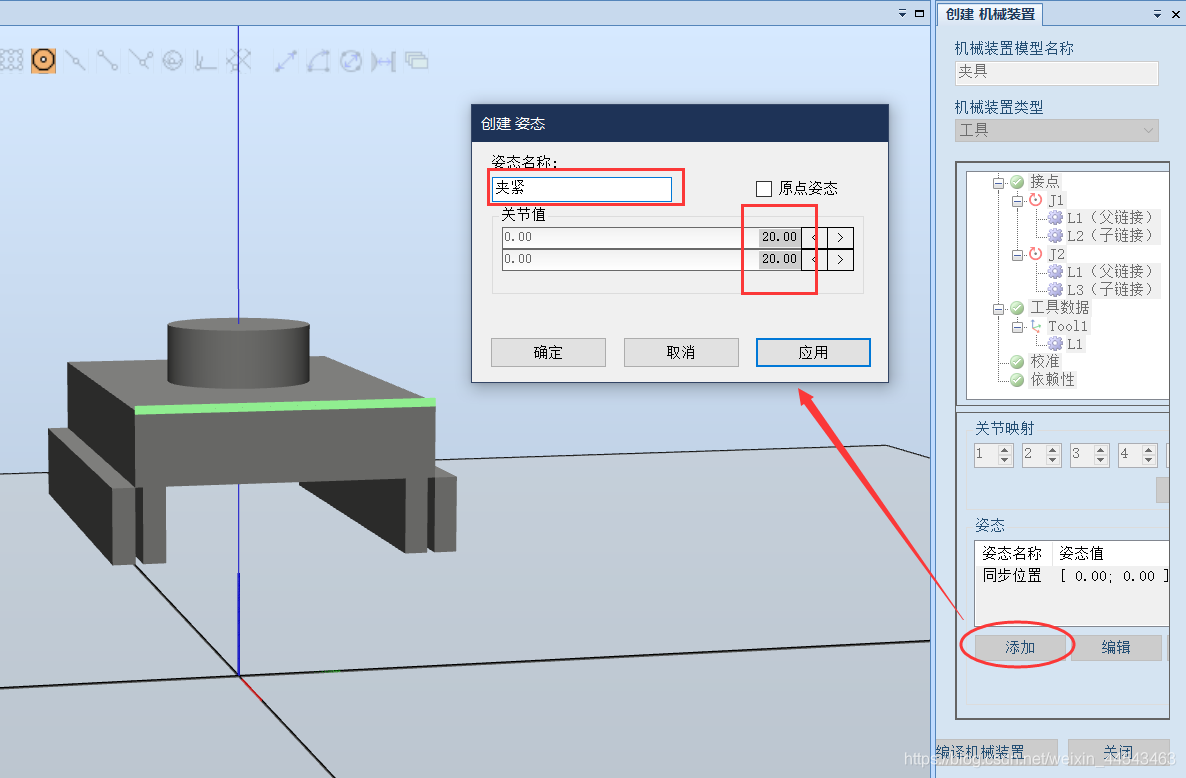
添加一个新姿态
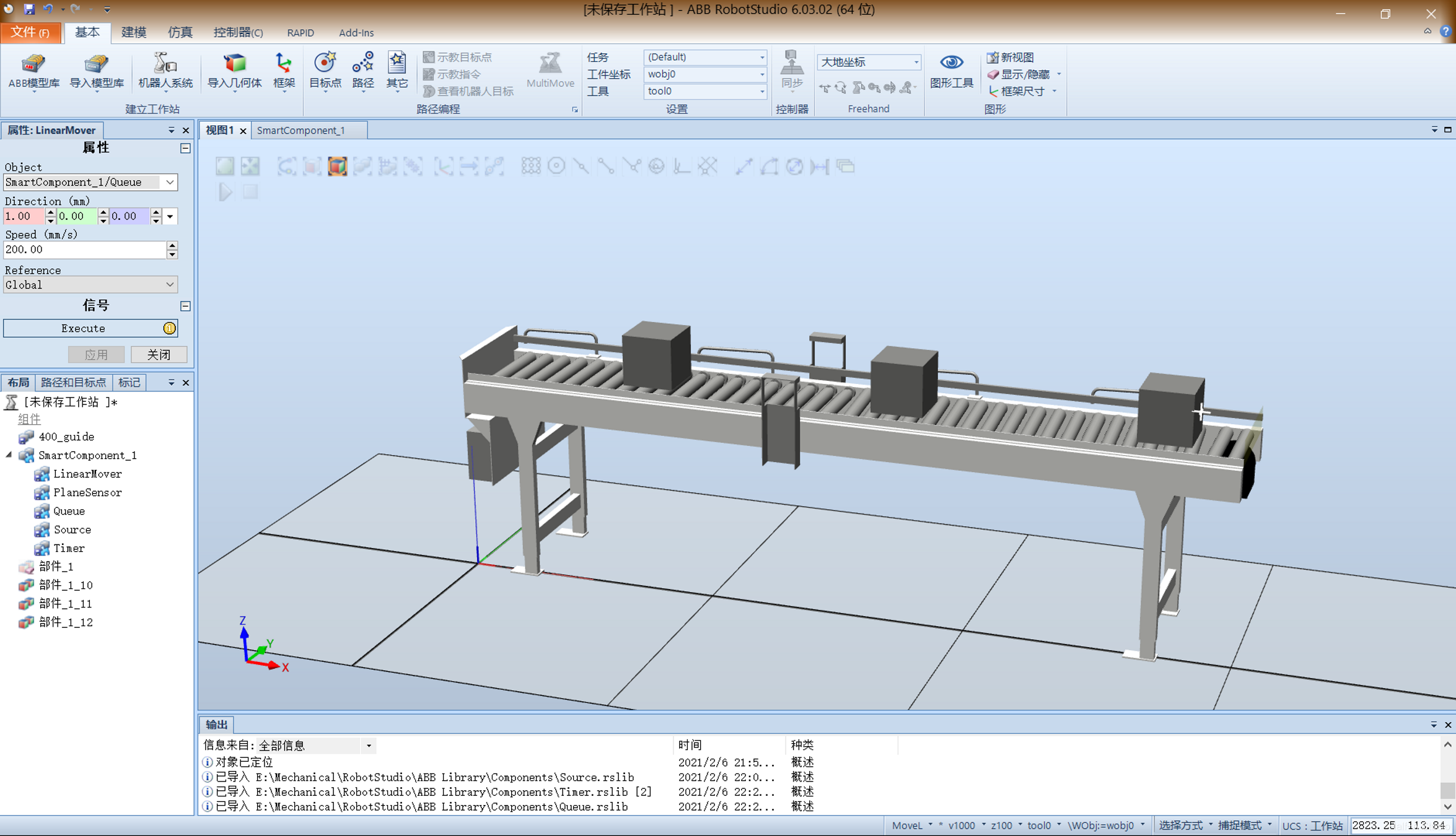
Smart组件设置
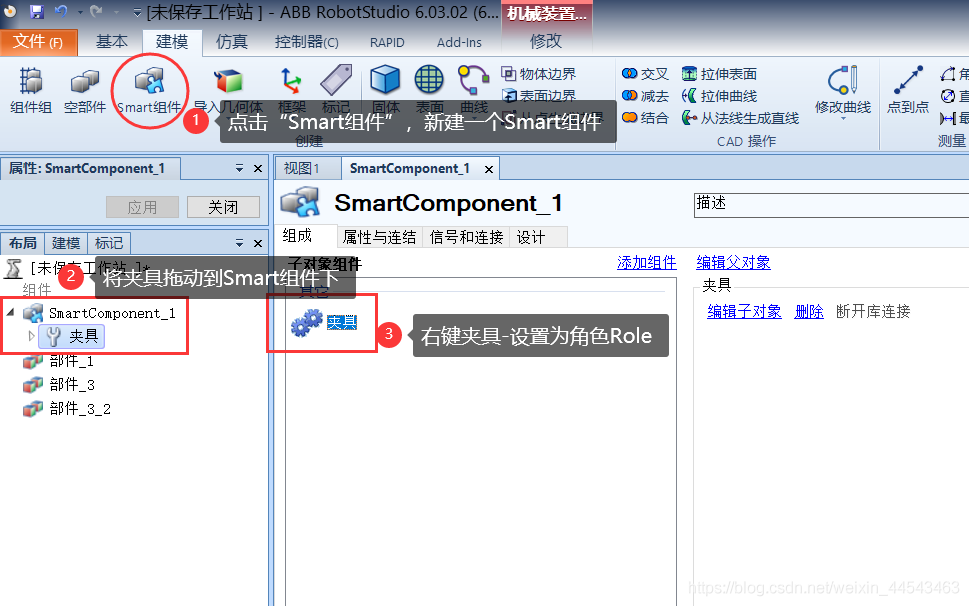
- 创建Smart组件,将夹具拖动到Smart组件下,并将夹具设置为Smart组件的角色Role
- 添加以下组件

- 添加信号

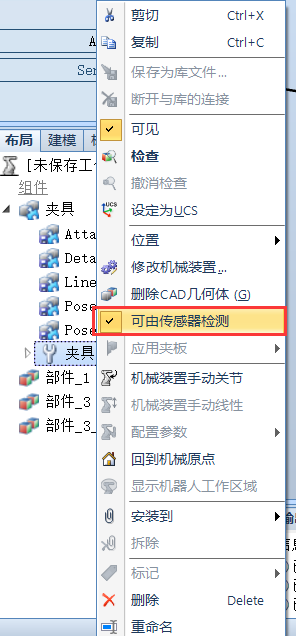
- 对各个组件进行设置,首先先设置夹具不可由传感器检测
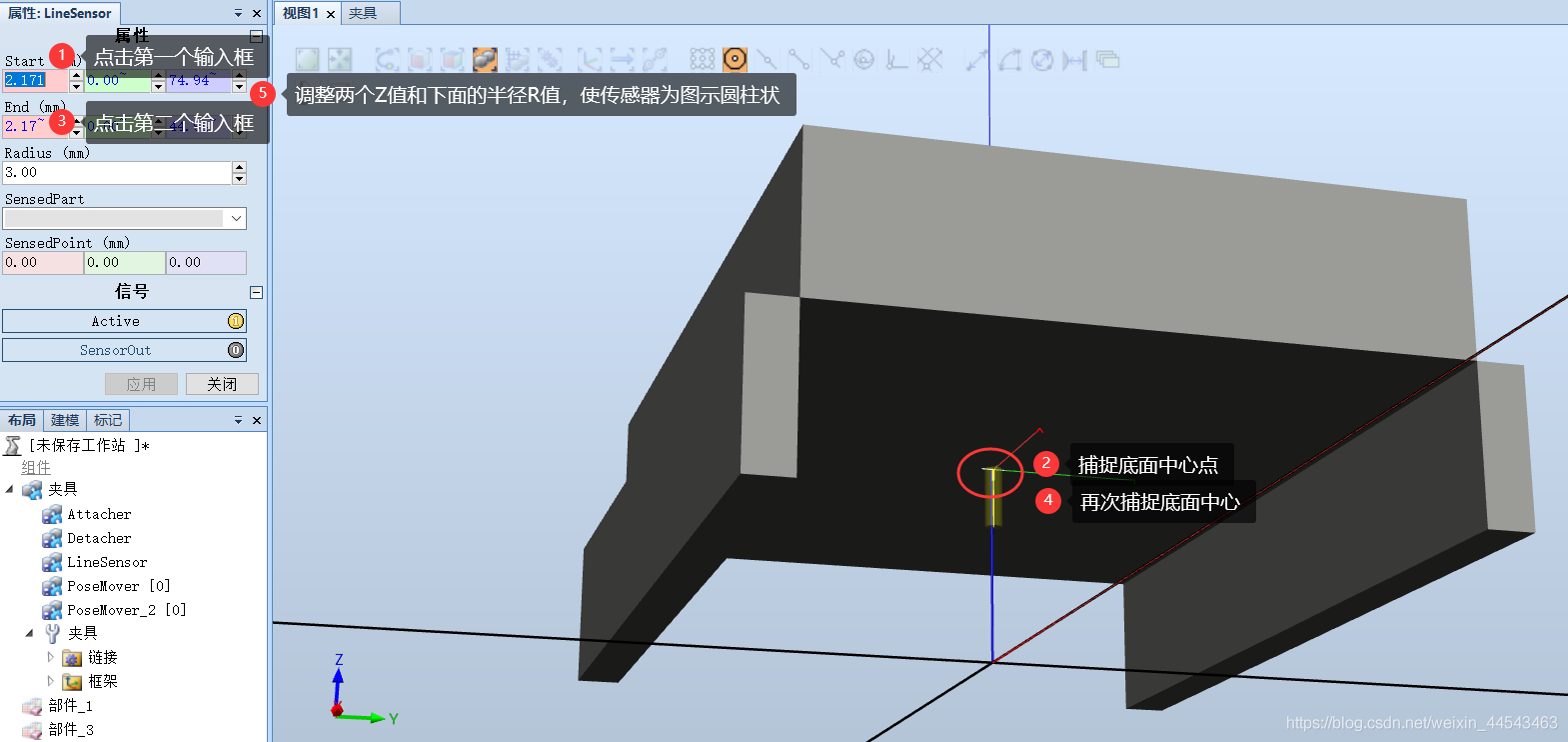
- 设置直线传感器,设置为图示圆柱状,用于检测夹具下方是否有物体
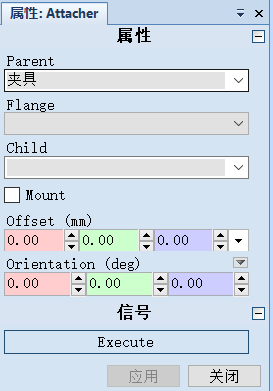
- 设置Attacher安装对象组件
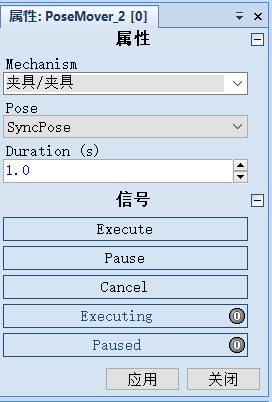
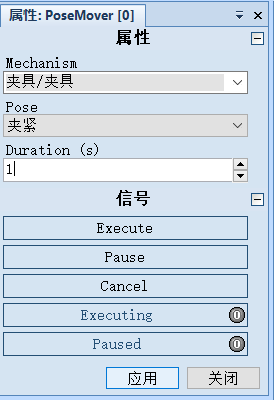
- 设置PoseMover,机械装置运动的属性
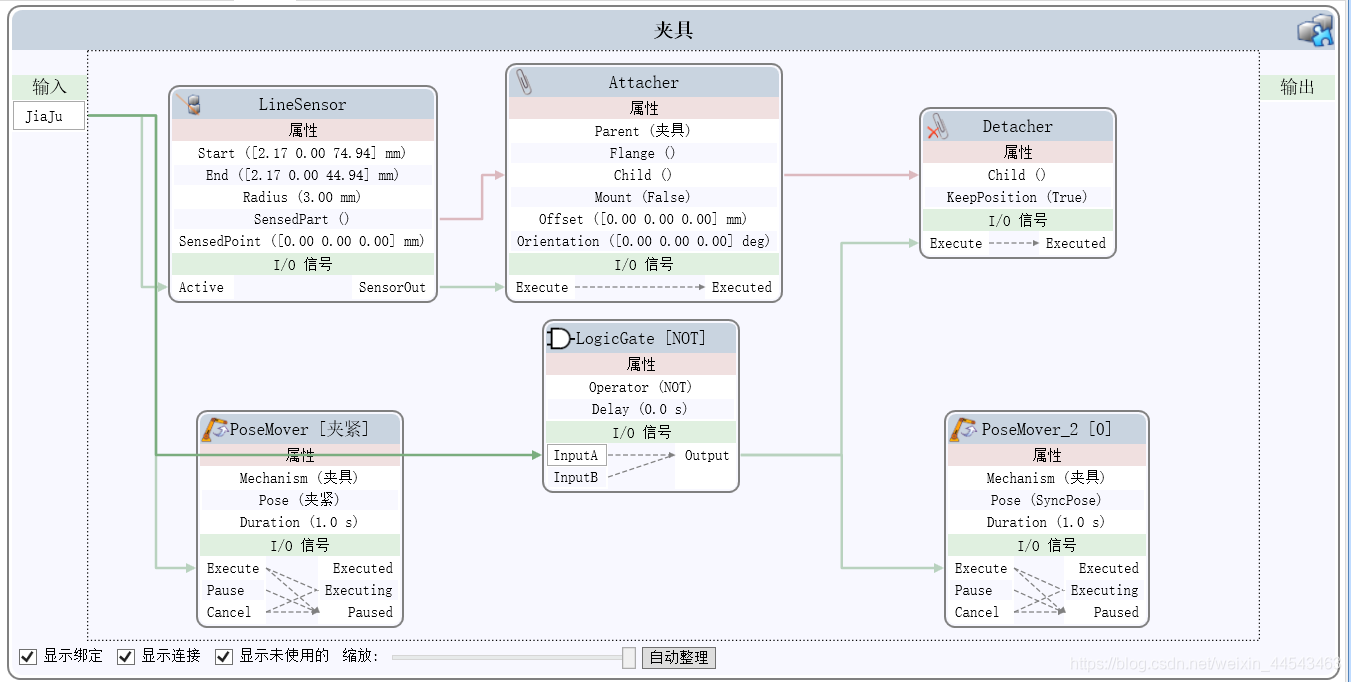
- 按图示设计程序框图
链接:https://pan.baidu.com/s/1pVwEuCmvoiwFlHMjRqEjLQ
提取码:rs04
 微信支付
微信支付 支付宝
支付宝
评论