1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
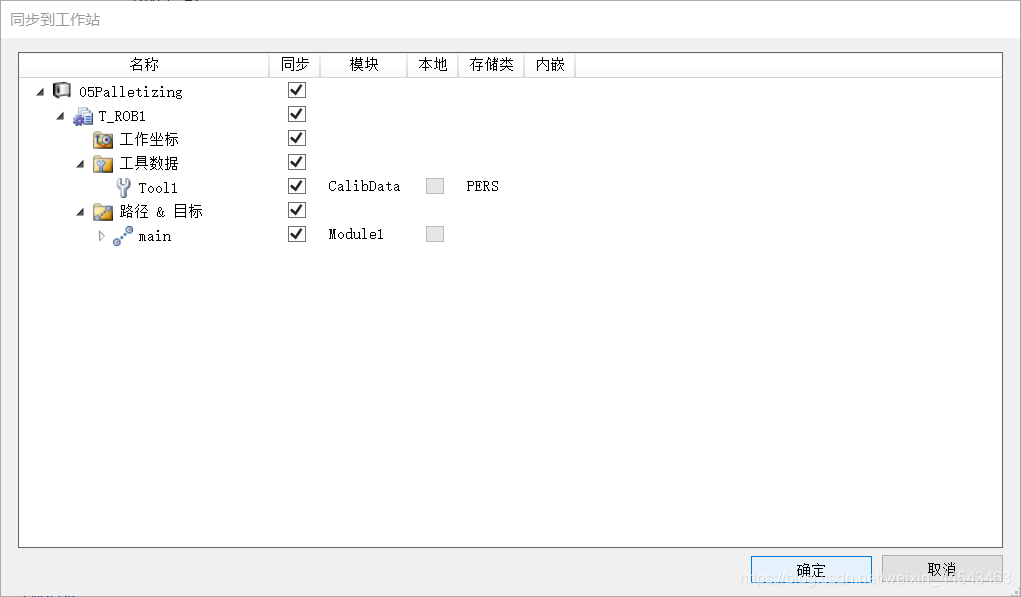
| MODULE Module1
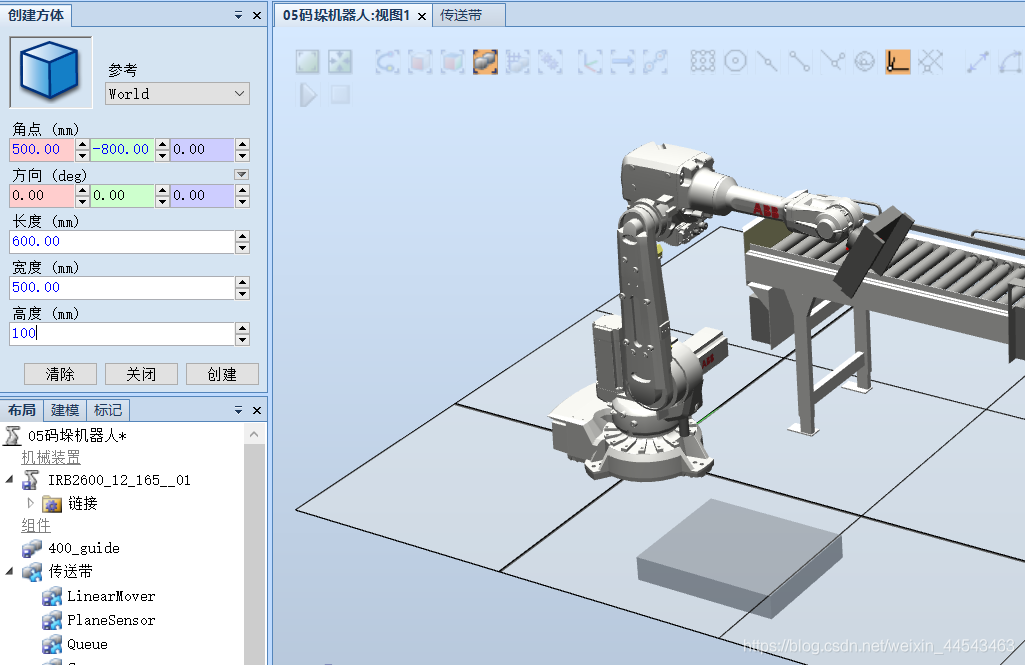
CONST robtarget Target_10:=[[347.037,682.5,875.06],[1,0,0,0],[0,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
CONST robtarget Target_20:=[[500,-300,100],[1,0,0,0],[-1,0,-1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
CONST robtarget Target_30:=[[500,-300,100],[0,0,0,1],[-1,0,1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];
VAR num layer:=1;
VAR num x:=0;
VAR num z:=0;
PROC main()
FOR i FROM 0 TO 20 DO
SetDO JiaJu0,0;
MoveJ Offs(Target_10,0,0,200),v500,fine,Tool1;
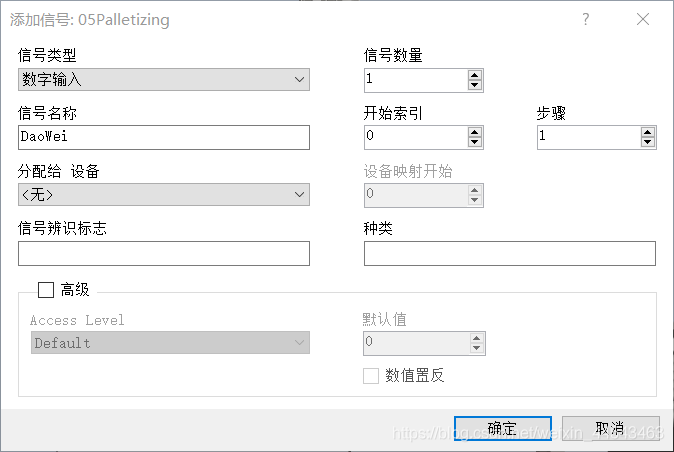
WaitDI DaoWei0,1;
MoveL Offs(Target_10,0,0,0),v500,fine,Tool1;
SetDO JiaJu0,1;
WaitTime 1;
MoveL Offs(Target_10,0,0,200),v500,fine,Tool1;
IF layer MOD 2 = 1 THEN
IF i MOD 5 < 4 and i MOD 5 <> 0 THEN
MoveL Offs(Target_30,90+x,-150,300+z),v500,fine,Tool1;
MoveL Offs(Target_30,90+x,-150,100+z),v500,fine,Tool1;
SetDO JiaJu0,0;
WaitTime 1;
MoveL Offs(Target_30,90+x,-150,300+z),v500,fine,Tool1;
x:=x+210;
IF i MOD 5 = 3 THEN
x:=0;
ENDIF
ELSE
MoveL Offs(Target_20,150+x,-410,300+z),v500,fine,Tool1;
MoveL Offs(Target_20,150+x,-410,100+z),v500,fine,Tool1;
SetDO JiaJu0,0;
WaitTime 1;
MoveL Offs(Target_20,150+x,-410,300+z),v500,fine,Tool1;
x:=x+300;
ENDIF
IF i MOD 5 = 0 THEN
layer:=2;
x:=0;
z:=z+100;
ENDIF
ELSE
IF i MOD 5 < 3 THEN
MoveL Offs(Target_20,150+x,-100,300+z),v500,fine,Tool1;
MoveL Offs(Target_20,150+x,-100,100+z),v500,fine,Tool1;
SetDO JiaJu0,0;
WaitTime 1;
MoveL Offs(Target_20,150+x,-100,300+z),v500,fine,Tool1;
x:=x+300;
IF i MOD 5 = 2 THEN
x:=0;
ENDIF
ELSE
MoveL Offs(Target_30,100+x,-350,300+z),v500,fine,Tool1;
MoveL Offs(Target_30,100+x,-350,100+z),v500,fine,Tool1;
SetDO JiaJu0,0;
WaitTime 1;
MoveL Offs(Target_30,100+x,-350,300+z),v500,fine,Tool1;
x:=x+210;
ENDIF
IF i MOD 5 = 0 THEN
layer:=1;
x:=0;
z:=z+100;
ENDIF
ENDIF
ENDFOR
z:=0;
ENDPROC
ENDMODULE
|










 微信支付
微信支付 支付宝
支付宝